In this article, we look at many concepts in Matrices and Vectors. In Matrices, we will take a look at Matrix Elimination, Matrix Determinant, Matrix Inverses, Matrix Multiplication, Subspace Projection Matrices, Reflection Matrices, Rotation Matrices, and Shearing Matrices. In Vectors, we will take a look at Angels, Normalization, Dot-Product and Cross-Product, and Projection.
Introduction
I am sharing with you my C# implementation of the basic linear algebra concepts. The full code has been posted to GitHub (https://github.com/elsheimy/Elsheimy.Components.Linears) under the MIT license and Nuget (https://www.nuget.org/packages/Elsheimy.Components.Linears/). Feel free to modify and deal with code without any restrictions or limitations (no guarantees of any kind too). And please let me know your feedback, comments, suggestions, and corrections.
The code covers the following:
Matrices
- Matrix addition / subtraction
- Matrix concatenation / shrinking / extraction
- Matrix reduction and elimination (Gauss and Gauss-Jordan)
- Matrix rank, solution, and solution state (unique, infinite, and no solution)
- Determinant calculation using Laplace Expansion method
- Invertibility and inverses
- Matrix mirrors
- Matrix multiplication and powers
- Transposes
- Identity matrices
- Transformation matrices
- Projection matrices
- Reflection matrices
- 2D and 3D rotation matrices
- 2D and 3D shearing matrices
- Cloning and equality comparers
Vectors
- Vector addition / subtraction
- Angel between vectors
- Vector normalization and magnitude calculator
- Dot product and cross product
- Vector scaling
- Projection onto other vectors and subspaces
- Cloning and equality comparers
The design is based on raw functions that operate on Array objects. Wrapper classes for matrices and vectors (Matrix and Vector, respectively) have been created to hide those keen functions. Static initializers and operators have been added to simplify the use of the wrapper classes.
Quote:
I will not go into a discussion of how a function mathematically works. Despite this, feel free to correct me whenever you want.
Let’s have a brief look at some of the highlights of the code.
Matrices
Matrix Elimination
This function demonstrates Gaussian and Gauss-Jordan elimination. It can be used to reduce a matrix to the row-echelon form (REF / Gaussian) or reduced row-echelon form (RREF / Gauss-Jordan.) It can be used to solve a matrix for a number of augmented columns and to calculate matrix rank.
public static MatrixEliminationResult Eliminate(double[,] input,
MatrixReductionForm form, int augmentedCols = 0) {
int totalRowCount = input.GetLength(0);
int totalColCount = input.GetLength(1);
if (augmentedCols >= totalColCount)
throw new ArgumentException(nameof(augmentedCols),
Properties.Resources.Exception_TooMuchAugmentedColumns);
MatrixEliminationResult result = new MatrixEliminationResult();
double[,] output = CreateCopy(input);
int numPivots = 0;
for (int col = 0; col < totalColCount - augmentedCols; col++) {
int? pivotRow = FindPivot(output, numPivots, col, totalRowCount);
if (pivotRow == null)
continue;
ReduceRow(output, pivotRow.Value, col, totalColCount);
SwitchRows(output, pivotRow.Value, numPivots, totalColCount);
pivotRow = numPivots;
numPivots++;
if (form == MatrixReductionForm.ReducedRowEchelonForm) {
for (int tmpRow = 0; tmpRow < pivotRow; tmpRow++)
EliminateRow(output, tmpRow, pivotRow.Value, col, totalColCount);
}
for (int tmpRow = pivotRow.Value; tmpRow < totalRowCount; tmpRow++)
EliminateRow(output, tmpRow, pivotRow.Value, col, totalColCount);
}
result.Rank = numPivots;
result.FullMatrix = output;
result.AugmentedColumnCount = augmentedCols;
if (augmentedCols > 0 &&
form == MatrixReductionForm.ReducedRowEchelonForm) {
result.Solution = ExtractColumns(output, totalColCount - augmentedCols, totalColCount - 1);
}
return result;
}
private static int? FindPivot(double[,] input, int startRow, int col, int rowCount) {
for (int i = startRow; i < rowCount; i++) {
if (input[i, col] != 0)
return i;
}
return null;
}
private static void SwitchRows(double[,] input, int row1, int row2, int colCount) {
if (row1 == row2)
return;
for (int col = 0; col < colCount; col++) {
var tmpVal1 = input[row1, col];
input[row1, col] = input[row2, col];
input[row2, col] = tmpVal1;
}
}
private static void ReduceRow(double[,] input, int row, int col, int colCount) {
var coeffecient = 1.0 / input[row, col];
if (coeffecient == 1)
return;
for (; col < colCount; col++)
input[row, col] *= coeffecient;
}
private static void EliminateRow(double[,] input, int row, int pivotRow,
int pivotCol, int colCount) {
if (pivotRow == row)
return;
if (input[row, pivotCol] == 0)
return;
double coeffecient = input[row, pivotCol];
for (int col = pivotCol; col < colCount; col++) {
input[row, col] -= input[pivotRow, col] * coeffecient;
}
}
This function has been wrapped into our Matrix wrapper with those functions:
public virtual Matrix Reduce(MatrixReductionForm form, int? augmentedColCount = null);
public virtual MatrixSolutionState GetSolutionState(int? augmentedColCount = null);
public virtual Matrix Solve(int? augmentedColCount = null);
public virtual int GetRank(int? augmentedColCount = null);
Matrix Determinant
This function determinant uses the Laplace Expansion method. It works by calculating the cross-product of the matrix. Here’s the implementation:
public static double Determinant(double[,] input) {
var results = CrossProduct(input);
return results.Sum();
}
public static double[] CrossProduct(double[,] input) {
int rowCount = input.GetLength(0);
int colCount = input.GetLength(1);
if (rowCount != colCount)
throw new InvalidOperationException(Properties.Resources.Exception_RequiredSquareMatrix);
if (rowCount == 0)
return new double[] { 1 };
if (rowCount == 1)
return new double[] { input[0, 0] };
if (rowCount == 2)
return new double[] { (input[0, 0] * input[1, 1]) - (input[0, 1] * input[1, 0]) };
double[] results = new double[colCount];
for (int col = 0; col < colCount; col++) {
var checkerboardFactor = col % 2.0 == 0 ? 1 : -1;
var coeffecient = input[0, col];
var crossMatrix = GetCrossMatrix(input, 0, col);
results[col] = checkerboardFactor * (coeffecient * Determinant(crossMatrix));
}
return results;
}
public static double[,] GetCrossMatrix(double[,] input, int skipRow, int skipCol) {
int rowCount = input.GetLength(0);
int colCount = input.GetLength(1);
var output = new double[rowCount - 1, colCount - 1];
int outputRow = 0;
for (int row = 0; row < rowCount; row++) {
if (row == skipRow)
continue;
int outputCol = 0;
for (int col = 0; col < colCount; col++) {
if (col == skipCol)
continue;
output[outputRow, outputCol] = input[row, col];
outputCol++;
}
outputRow++;
}
return output;
}
Matrix Inverses
The matrix inverse function eliminates a function and determines if all columns are unique by checking matrix rank. Another function checks if the matrix is invertible by checking determinant.
public static bool IsInvertible(double[,] input) {
var rowCount = input.GetLength(0);
var colCount = input.GetLength(1);
if (rowCount != colCount)
return false;
return Determinant(input) != 0;
}
public static double[,] Invert(double[,] matrix) {
var rowCount = matrix.GetLength(0);
var colCount = matrix.GetLength(1);
if (rowCount != colCount)
throw new InvalidOperationException(Properties.Resources.Exception_RequiredSquareMatrix);
var newMatrix = ConcatHorizontally(matrix, CreateIdentityMatrix(rowCount));
var result = Eliminate(newMatrix, MatrixReductionForm.ReducedRowEchelonForm, rowCount);
if (result.Rank != colCount)
return null;
return result.Solution;
}
Matrix Multiplication
Four variations of the Multiply function available: scalar multiplication, matrix multiplications, unsafe multiplications, and powers.
public static double[,] Multiply(double scalar, double[,] input) {
var rowCount = input.GetLength(0);
var colCount = input.GetLength(1);
double[,] output = new double[rowCount, colCount];
for (int row = 0; row < rowCount; row++) {
for (int col = 0; col < colCount; col++) {
output[row, col] = scalar * input[row, col];
}
}
return output;
}
public static double[,] Multiply(double[,] matrix1, double[,] matrix2) {
var matrix1Rows = matrix1.GetLength(0);
var matrix1Cols = matrix1.GetLength(1);
var matrix2Rows = matrix2.GetLength(0);
var matrix2Cols = matrix2.GetLength(1);
if (matrix1Cols != matrix2Rows)
throw new InvalidOperationException(Properties.Resources.Exception_UndefinedProduct);
double[,] output = new double[matrix1Rows, matrix2Cols];
for (int matrix1_row = 0; matrix1_row < matrix1Rows; matrix1_row++) {
for (int matrix2_col = 0; matrix2_col < matrix2Cols; matrix2_col++) {
for (int matrix1_col = 0; matrix1_col < matrix1Cols; matrix1_col++) {
output[matrix1_row, matrix2_col] += matrix1[matrix1_row, matrix1_col] *
matrix2[matrix1_col, matrix2_col];
}
}
}
return output;
}
public static double[,] MultiplyUnsafe(double[,] matrix1, double[,] matrix2) {
var matrix1Rows = matrix1.GetLength(0);
var matrix1Cols = matrix1.GetLength(1);
var matrix2Rows = matrix2.GetLength(0);
var matrix2Cols = matrix2.GetLength(1);
if (matrix1Cols != matrix2Rows)
throw new InvalidOperationException(Properties.Resources.Exception_UndefinedProduct);
double[,] output = new double[matrix1Rows, matrix2Cols];
unsafe
{
fixed (
double* pProduct = output,
pMatrix1 = matrix1,
pMatrix2 = matrix2) {
int i = 0;
for (int matrix1_row = 0; matrix1_row < matrix1Rows; matrix1_row++) {
for (int matrix2_col = 0; matrix2_col < matrix2Cols; matrix2_col++) {
for (int matrix1_col = 0; matrix1_col < matrix1Cols; matrix1_col++) {
var val1 = *(pMatrix1 + (matrix1Rows * matrix1_row) + matrix1_col);
var val2 = *(pMatrix2 + (matrix2Cols * matrix1_col) + matrix2_col);
*(pProduct + i) += val1 * val2;
}
i++;
}
}
}
}
return output;
}
public static double[,] Power(double[,] input, int power) {
if (input.GetLength(0) != input.GetLength(1))
throw new InvalidOperationException(Properties.Resources.Exception_RequiredSquareMatrix);
if (power < 0)
throw new ArgumentException(nameof(power));
if (power == 0)
return CreateIdentityMatrix(input.GetLength(0));
double[,] output = CreateCopy(input);
for (int i = 0; i < power; i++) {
output = Multiply(output, input);
}
return output;
}
Subspace Projection Matrices
The following function creates projection matrix from a subspace.
public static double[,] CreateProjectionMatrix(double[,] subspace) {
var subspaceTranspose = MatrixFunctions.Transpose(subspace);
double[,] value = MatrixFunctions.Multiply(subspaceTranspose, subspace);
value = MatrixFunctions.Invert(value);
value = MatrixFunctions.Multiply(value, subspaceTranspose);
value = MatrixFunctions.Multiply(subspace, value);
return value;
}
Reflection Matrices
The following functions create 2D and 3D reflection matrices:
public static double[,] Create2DReflectionMatrix(MatrixAxis axis) {
if (axis == MatrixAxis.Z)
throw new InvalidOperationException(Properties.Resources.Exception_InvalidAxis);
var output = CreateIdentityMatrix(2);
if (axis == MatrixAxis.X)
output[1, 1] *= -1;
else if (axis == MatrixAxis.Y )
output[0, 0] *= -1;
return output;
}
public static double[,] Create3DReflectionMatrix(Matrix3DReflectionPlane axis) {
var output = CreateIdentityMatrix(4);
if (axis == Matrix3DReflectionPlane.XY)
output[2, 2] *= -1;
else if (axis == Matrix3DReflectionPlane.YZ)
output[0,0] *= -1;
else if (axis == Matrix3DReflectionPlane.ZX)
output[1,1] *= -1;
return output;
}
Rotation Matrices
The following functions create 2D and 3D rotation matrices. They accept angle, unit (radians / degrees) and direction (clockwise / counter-clockwise):
public static double[,] Create2DRotationMatrix
(double angle, AngleUnit unit, MatrixRotationDirection direction) {
double angleRadians = angle;
if (unit == AngleUnit.Degrees)
angleRadians = Converters.DegreesToRadians(angleRadians);
double[,] output = new double[2, 2];
output[0, 0] = Math.Cos(angleRadians);
output[1, 0] = Math.Sin(angleRadians);
output[0, 1] = Math.Sin(angleRadians);
output[1, 1] = Math.Cos(angleRadians);
if (direction == MatrixRotationDirection.Clockwise)
output[1, 0] *= -1;
else
output[0, 1] *= -1;
return output;
}
public static double[,] Create3DRotationMatrix
(double angle, AngleUnit unit, MatrixAxis axis) {
double angleRadians = angle;
if (unit == AngleUnit.Degrees)
angleRadians = Converters.DegreesToRadians(angleRadians);
double[,] output = new double[3, 3];
if (axis == MatrixAxis.X) {
output[0, 0] = 1;
output[1, 1] = Math.Cos(angleRadians);
output[2, 1] = Math.Sin(angleRadians);
output[1, 2] = -1 * Math.Sin(angleRadians);
output[2, 2] = Math.Cos(angleRadians);
} else if (axis == MatrixAxis.Y) {
output[1, 1] = 1;
output[0, 0] = Math.Cos(angleRadians);
output[2, 0] = -1 * Math.Sin(angleRadians);
output[0, 2] = Math.Sin(angleRadians);
output[2, 2] = Math.Cos(angleRadians);
} else if (axis == MatrixAxis.Z) {
output[2, 2] = 1;
output[0, 0] = Math.Cos(angleRadians);
output[1, 0] = Math.Sin(angleRadians);
output[0, 1] = -1 * Math.Sin(angleRadians);
output[1, 1] = Math.Cos(angleRadians);
}
return output;
}
Shearing Matrices
The following functions create shearing matrices using a specific factor over the given axis.
public static double[,] Create2DShearingMatrix(double factor, MatrixAxis axis) {
if (axis == MatrixAxis.Z)
throw new InvalidOperationException(Properties.Resources.Exception_InvalidAxis);
var output = CreateIdentityMatrix(2);
if (axis == MatrixAxis.X)
output[0, 1] = factor;
else if (axis == MatrixAxis.Y )
output[1, 0] = factor;
return output;
}
public static double[,] Create3DShearingMatrix(double factor, MatrixAxis axis) {
var output = CreateIdentityMatrix(4);
if (axis == MatrixAxis.X) {
output[1, 0] = factor;
output[2, 0] = factor;
} else if (axis == MatrixAxis.Y) {
output[0, 1] = factor;
output[2, 1] = factor;
} else if (axis == MatrixAxis.Z) {
output[0, 2] = factor;
output[1, 2] = factor;
}
return output;
}
Vectors
The following lists some of the major vector functions covered in this library. We are having a look at the raw functions. Wrappers covered later.
Angels
This function calculates the angle between two vectors. It relies on two other functions, DotProduct and GetMagnitude.
public static double AngleBetween(double[] vector1, double[] vector2, AngleUnit unit) {
if (vector1.Length != vector2.Length)
throw new InvalidOperationException(Properties.Resources.Exception_DimensionsMismatch);
var dotProduct = DotProduct(vector1, vector2);
var lengthProduct = GetMagnitude(vector1) * GetMagnitude(vector2);
var result = Math.Acos(dotProduct / lengthProduct);
if (unit == AngleUnit.Degrees)
result = Converters.RadiansToDegrees(result);
return result;
}
Normalization
The following code demonstrates two operations: normalization (i.e., converting to unit vector) and magnitude (length) calculator.
public static double[] ToUnitVector(double[] input) {
var length = input.Length;
double[] output = new double[length];
var coeffecient = 1.0 / GetMagnitude(input);
for (int i = 0; i < length; i++) {
output[i] = coeffecient * input[i];
}
return output;
}
public static double GetMagnitude(double[] input) {
double val = 0;
for (int i = 0; i < input.Length; i++)
val += input[i] * input[i];
val = Math.Sqrt(val);
return val;
}
Dot-Product and Cross-Product
The following code demonstrates scaling, dot-product, and cross product.
public static double DotProduct(double[] vector1, double[] vector2) {
if (vector1.Length != vector2.Length)
throw new InvalidOperationException(Properties.Resources.Exception_DimensionsMismatch);
double product = 0;
for (int i = 0; i < vector1.Length; i++)
product += vector1[i] * vector2[i];
return product;
}
public static double[] Scale(double scalar, double[] vector) {
double[] product = new double[vector.Length];
for (int i = 0; i < vector.Length; i++) {
product[i] = scalar * vector[i];
}
return product;
}
public static double[] CrossProduct(double[] vector1, double[] vector2) {
int length = 3;
if (length != vector1.Length || length != vector2.Length)
throw new InvalidOperationException(Properties.Resources.Exception_3DRequired);
double[,] matrix = new double[length, length];
for (int row = 0; row < length; row++) {
for (int col = 0; col < length; col++) {
if (row == 0)
matrix[row, col] = 1;
else if (row == 1)
matrix[row, col] = vector1[col];
else if (row == 2)
matrix[row, col] = vector2[col];
}
}
return MatrixFunctions.CrossProduct(matrix);
}
Projection
Projection of a vector onto another vector is handled using the following functions:
public static double ProjectionFactor(double[] vector1, double[] vector2) {
return DotProduct(vector1, vector2) / DotProduct(vector2, vector2);
}
public static double[] Projection(double[] vector1, double[] vector2) {
var factor = ProjectionFactor(vector1, vector2);
return Scale(factor, vector2);
}
Wrappers
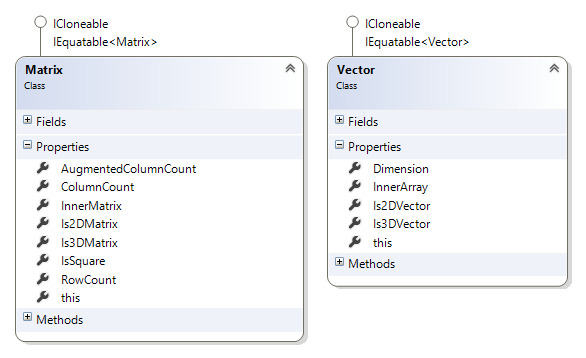
Working with raw Array objects especially multi-dimensional arrays is fairly cumbersome. To make it easier, we wrapped those raw functions into two wrapper classes, Matrix and Vector. Both classes implement ICloneable and IEquatable. Both have indexers and a direct way to access their inner representation (i.e., array).
Properties and Methods
The following figures show the exported members of both classes.

Operators
We overrode some operators for both classes to allow clean and clear access to their operations. Here’s the overridden operator list for Matrix:
public static Matrix operator +(Matrix m) { return m; }
public static Matrix operator -(Matrix m) { return m.Scale(-1); }
public static Matrix operator +(Matrix a, Matrix b) { return a.Add(b); }
public static Matrix operator -(Matrix a, Matrix b) { return a.Subtract(b); }
public static Matrix operator +(Matrix a, double[,] b) { return a.Add(b); }
public static Matrix operator -(Matrix a, double[,] b) { return a.Subtract(b); }
public static Matrix operator *(double a, Matrix m) { return m.Scale(a); }
public static Matrix operator *(Matrix a, Matrix b) { return a.Multiply(b); }
public static Matrix operator *(Matrix a, double[,] b) { return a.Multiply(b); }
public static bool operator ==(Matrix a, Matrix b) {
if ((a as object) == null || (b as object) == null)
return false;
return a.Equals(b);
}
public static bool operator !=(Matrix a, Matrix b) {
if ((a as object) == null || (b as object) == null)
return false;
return a.Equals(b) == false;
}
public static Matrix operator ^(Matrix a, int power) { return a.Power(power); }
public static implicit operator double[,] (Matrix m) { return m.InnerMatrix; }
public static explicit operator Matrix(double[,] m) { return new Linears.Matrix(m); }
Last Word
As stated previously, the code is using the MIT license. So please use the code without any restrictions, limitations, or warranties, and feel free to relay your comments, suggestions, and corrections.
History
- 12th March, 2020: Initial version

