Introduction
In one of my projects, I had an opportunity to create an Atlas Copco PowerFocus (3000/4000) Nutrunner Tools communication using C# socket programming. When I started the Nutrunner tool communication program, it was like a blank page. I did not have an idea of how to complete the task; I was Googling for a couple of days but couldn’t find a sample code to communicate with Nutrunner tools using C#. Finally, I got a solution using an Open protocol. Today, I will explain to you what is C# socket communication program for Nutrunner tool communication.
You can download the Open protocol document from this website.
Atlas Copco OpenProtocol Forum
Communication Messages
MID 0001 Communication Start
This message enables the communication. The controller does not respond to any other command before this:
- Message sent by: Integrator
- Answers: MID 0002 Communication start acknowledge or MID 0004 Command error, Client already connected.
If the communication is accepted, we can receive the result as MID 0002, if not, we receive the MID 0004. For more details about Open protocol, please review the attached Open protocol PDF document.
C# Socket Communication Program for Nutrunner Tool Communication
- Connect
- Communicate
- Data send and receive
- Disconnect
The detailed code will be listed below.
Background
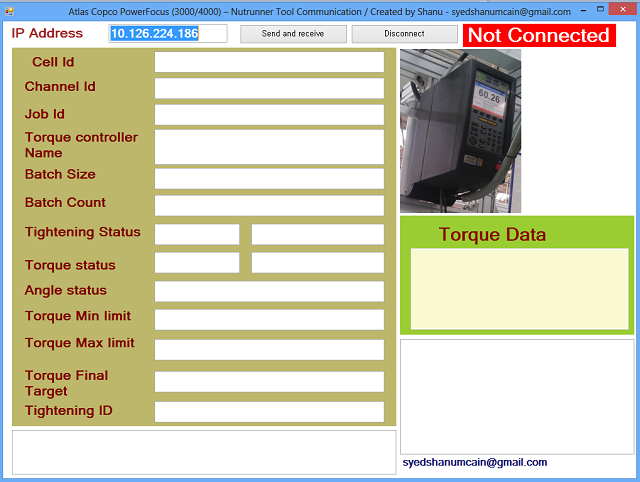
The main aim was to develop a simple and easy to use .NET communication program for Atlas Copco Power Focus (3000/4000) – Nutrunner Tool.
Using the Code
The code is very simple and has comments on all functions. The main aim is to make the program very simple and easy to use; all the functions have been well commented in the project.
using System.Net;
using System.IO;
using System.Net.Sockets;
Socket server;
IPEndPoint ip;
For connection, we need the Nutrunner tool IP address. Here my tool's IP address is “10.126.224.186” and the default port for communication is “4545”. Cross check with your hardware engineer for the port used on your tools. Here, we use the socket communication program for connection. After the connection is OK, we need to send the Communication Start signal to the NutRunner tool “ MID 0001” – (“00200001000000000000#).
Server.Send()
String szData = "00200001000000000000#";
byte[] byData = Encoding.Default.GetBytes(szData);
int sent = server.Send(byData, SocketFlags.None);
server.Receive()
byte[] bytesFrom = new byte[1025];
int iRx = server.Receive(bytesFrom);
string dataFromClient = System.Text.Encoding.ASCII.GetString(bytesFrom);
String resultchk = dataFromClient.Substring(4, 4).ToString();
If we receive MID 0002 as result, then the communication start is successful. If we receive MID 0004 as result, then there is an error in the communication start. The detail connect functions:
private void button1_Click(object sender, EventArgs e)
{
try
{
server = new Socket(AddressFamily.InterNetwork, SocketType.Stream, ProtocolType.Tcp);
String ipaddress = "10.126.224.186";
ip = new IPEndPoint(IPAddress.Parse(ipaddress), 4545);
server.Connect(ip);
label2.BackColor = System.Drawing.Color.GreenYellow;
label2.Text = "Connected";
connectServer();
}
catch (Exception ex)
{
}
}
private void connectServer()
{
try
{
if (server.Connected == false)
{
label2.BackColor = System.Drawing.Color.Red;
server = new Socket(AddressFamily.InterNetwork,
SocketType.Stream, ProtocolType.Tcp);
String ipaddress = textips.Text.Trim();
ip = new IPEndPoint(IPAddress.Parse(ipaddress), 4545);
server.Connect(ip);
label2.BackColor = System.Drawing.Color.GreenYellow;
label2.Text = "Connected";
}
if (server.Connected == true)
{
String szData = "00200001000000000000#";
byte[] byData = Encoding.Default.GetBytes(szData);
int sent = server.Send(byData, SocketFlags.None);
byte[] bytesFrom = new byte[1025];
int iRx = server.Receive(bytesFrom);
string dataFromClient = System.Text.Encoding.ASCII.GetString(bytesFrom);
String resultchk = dataFromClient.Substring(4, 4).ToString();
timer1.Enabled = true;
}
}
catch (Exception ex)
{
MessageBox.Show(ex.Message.ToString());
}
}
Here in my program, I have used a Timer control for Torque data receive. In the timer, we frequently check for the connection. If connection fails, we reconnect to the NutRunner tools. To receive the Torque data, we use the message ID MID 0060. For Torque data receive, we send the MID 0060 to the Nutrunner tool.
MID 0060 Last Tightening Result Data Subscribe
Set the subscription for the result tightening. The result of this command will be the transmission of the tightening result after the tightening is performed (push function). The MID revision in the header is used to subscribe to different revisions of MID 0061 Last tightening result data upload reply.
Send data to get Torque result:
String szData = "00200060000000000000#";
byte[] byData = Encoding.Default.GetBytes(szData);
int sent = server.Send(byData, SocketFlags.None);
Receive Torque Result
byte[] bytesFrom = new byte[1025];
int iRx = server.Receive(bytesFrom);
string dataFromClient = System.Text.Encoding.ASCII.GetString(bytesFrom);
String resultchk = dataFromClient.Substring(4, 4).ToString();
We receive MID 0061 as result with the Torque data. We will receive the result data something like this: "023100610010 010001020103airbag7 04KPOL3456JKLO897 05000600307000008000009010011112000840 130014001400120015000739160000017099991800000 1900000202001-06-02:09:54:09212001-05-29:12:34:3322123345675 NUL". Format the result string and get the Torque final result. For example, I have used the substring and get the final torque result here:
txtfinaltorque.Text = dataFromClient.Substring(132, 6).ToString();
The detailed timer code:
private void timer1_Tick(object sender, EventArgs e)
{
try
{
if (server.Connected == false)
{
label2.BackColor = System.Drawing.Color.Red;
label2.Text = "Not Connected";
server.Disconnect(true);
server.Close();
server.Dispose();
connectServer();
}
String szData = "00200060000000000000#";
byte[] byData = Encoding.Default.GetBytes(szData);
int sent = server.Send(byData, SocketFlags.None);
byte[] bytesFrom = new byte[1025];
int iRx = server.Receive(bytesFrom);
string dataFromClient = System.Text.Encoding.ASCII.GetString(bytesFrom);
String resultchk = dataFromClient.Substring(4, 4).ToString();
if (resultchk == "0061")
{
label2.BackColor = Color.Violet;
label2.Text = "Torque Data Readed ";
textBox1.Text = dataFromClient.ToString();
txtcellid.Text = dataFromClient.Substring(22, 4).ToString();
txtchannelid.Text = dataFromClient.Substring(28, 2).ToString();
txtjobid.Text = dataFromClient.Substring(86, 2).ToString();
txtControlorName.Text = dataFromClient.Substring(32, 25).ToString();
txtBatchSize.Text = dataFromClient.Substring(95, 4).ToString();
txtBatchCount.Text = dataFromClient.Substring(101, 4).ToString();
txttighteningstatus.Text = dataFromClient.Substring(107, 1).ToString();
if (txttighteningstatus.Text.Trim() == "0")
{
txttighteningstatusok.Text = "NOK";
}
else
{
txttighteningstatusok.Text = "OK";
}
txttorquestatus.Text = dataFromClient.Substring(110, 1).ToString();
if (txttorquestatus.Text.Trim() == "0")
{
txttorquestatusok.Text = "Low";
}
else if (txttorquestatus.Text.Trim() == "1")
{
txttorquestatusok.Text = "OK";
}
else
{
txttorquestatusok.Text = "High";
}
txtanglestatus.Text = dataFromClient.Substring(113, 1).ToString();
txttorqueminlimit.Text = dataFromClient.Substring(116, 6).ToString();
txttorquemax.Text = dataFromClient.Substring(124, 6).ToString();
txtfinaltorque.Text = dataFromClient.Substring(132, 6).ToString();
txttorque.Text = dataFromClient.Substring(142, 2).ToString() + "." +
dataFromClient.Substring(144, 2).ToString();
txtTighteningID.Text = dataFromClient.Substring(221, 10).ToString();
String szData3 = "00200062000000000000#";
byte[] byData3 = Encoding.Default.GetBytes(szData3);
int sent3 = server.Send(byData3, SocketFlags.None);
}
}
catch (Exception ex)
{
}
}
Check for the connection if it's connected, then disconnect the communication in the detailed code below:
private void button2_Click(object sender, EventArgs e)
{
if (server.Connected == true)
{
label2.BackColor = System.Drawing.Color.Red;
label2.Text = "Not Connected";
server.Disconnect(true);
server.Close();
server.Dispose();
clears();
}
}
- First, we start with namespace declarations
- Variable declarations
- Connect (to connect the Nutrunner tool for communication)
- Torque Data Receive
- Message sent by: Integrator
- Answer: MID 0005 Command accepted or MID 0004 Command error, Last tightening subscription already exists or MID revision not supported
- Disconnect the connection
Points of Interest
I love to work and play with the HMI (Human Interface Program). I have worked with several HML programs using C# like PLC, sensor programming, and Nutrunner tool communication program. While working with this program, I didn’t get the proper guides to achieve the result, but finally I got it to work. I want end users who read this article to benefit from this program.
If you like my article, leave me a comment and vote for my article.
History
- 26th February, 2015: Initial post

