Contents
The process of developing the Station Blue product uncovered a number of performance issues with the .NET serial port interface. The Station Blue product software runs on desktop and mobile devices using either hardwired serial ports or Bluetooth. The port speed in all cases is 9600 baud, which can be assumed to be fast enough to control model trains, especially considering that the newer digital model railway systems are effectively limited to a data speed of less than 9000 baud. However, while the average data flow rate might be described as light, bursts of large amounts of data can occur. Under these circumstances, it was found that the Microchip PIC based device at the remote end could actually outrun the C#.NET software at the PC end.
This article describes a number of simple test programs designed to demonstrate performance issues with the .NET serial port interface and what might be done to improve things. In most practical cases, the serial port is used to facilitate control of a device by a PC. However, to avoid unnecessary complexity, the test setups devised in this article use a PC at both ends of the serial link.
These days, many new computers do not have a physical serial port. However if you are so included, there is usually a connection point for a serial port on the motherboard itself. So if you have a bent for lifting the lid off your computer, you probably also have a cupboard full of old computer parts, some of which could be fairly easily used to install a physical serial port. Failing this, USB to serial converter cables are available from electronics shops.
In any case, serial port communication is intended primarily to facilitate the control of a device. In the project presented here, two computers are connected together via their serial ports. To make each computer appear like a device to the other, it is necessary to either use a null modem cable between the two computers, or to connect a null modem device into the cables connecting the two computers.
Alternatively, a serial port connection can be established using Bluetooth. For those computers that do not already have Bluetooth, Bluetooth dongles can be purchased for about the same money as a USB to serial converter cable. However, if you think that Bluetooth gets you out of the computer/device null modem cabling problem, think again. A typical My Bluetooth Places window contains icons representing Bluetooth devices providing services. So your device (or simulated device) must appear in that window for the PC to connect to. Thus, if your device is in fact another computer, you must go to the Bluetooth services window on that computer to determine which virtual serial port or ports are available to provide the required service.
The typical scenario I am attempting to represent in this article is of a data collecting device connected to a PC that is providing a user friendly interface. That user friendly interface has been developed in C#. It interprets and displays the collected data, and may be required to send controlling data to the device, based on a number of inputs.
As indicated earlier, for the purposes of this exercise, the data collecting device is in fact another PC. The data being collected is simply the time of day. On the PC providing the interface, the user may select the number and frequency of data samples required. The collected data samples are displayed in a list view, along with the time that the request for data was actually sent and the time that the data was finally received. To add to the complexity of the data collection task, the user may require the same samples to be collected in a number of different process threads.
In this project, the data collecting device is referred to as "RemoteTimeReader", and the user friendly interface is referred to as "LocalTimeReader". Mark 1 versions in each case follow a fairly conventional development path with less than perfect results. Mark 2 versions provide significant improvements.
The message definitions for the TimeReader project are described in the following table:
| Message | Code | Data |
| Acknowledge Request | 0x01 | |
| Acknowledge | 0x02 | |
| Acknowledge Received | 0x03 | |
| Time Request | 0x04 | index, time 1 |
| Time | 0x05 | index, time 1, time 2 |
Once the device (RemoteTimeReader) has started, it periodically sends out Acknowledgement Request messages. Once the PC interface (LocalTimeReader) has started, it responds to Acknowledge Request messages with an Acknowledge message. The device responds to an Acknowledge message with an Acknowledge Received message. During extended idle periods, both the device and the interface will test the line by sending Acknowledge Request and Acknowledge messages, respectively.
Significantly, the Acknowledge Request, Acknowledge, and Acknowledge Received messages are all one byte long to avoid synchronization issues. In fact, when the device first starts up, it will only accept Acknowledge messages. In larger systems, devices may drop back to only sending Acknowledge Request messages and only receiving Acknowledge messages, if a communication error is detected.
The Time Request message received by the device contains an index to the process thread within the PC interface that sent the message, and the time that the message was sent.
The Time message sent back to the PC interface contains the index and time information sent to the device, along with the time actually recorded by the device at the remote end.
So to some code. The Message class is used to both collect data for a message and define that message for subsequent processes. It is used by both RemoteTimeReader and LocalTimeReader. The Message class constructor is shown below:
public Message(byte first)
{
code = first;
status = MessageStatus.InProgress;
if (code == 0x01 || code == 0x02 || code == 0x03)
status = MessageStatus.Complete;
else
dataCount = 0;
}
The first byte for the message is passed in the constructor. The first byte is the only byte for code 0x01, code 0x02, and code 0x03 messages, and thus the message status changes to "Complete" within the constructor for these messages. For messages longer than one byte, the Add method is called until the message status changes to "Complete". The Add method is shown below:
public void Add(byte next)
{
if (code != 0x04 && code != 0x05)
return;
if (dataCount == 0)
{
index = next;
dataCount = 1;
return;
}
timeBytes[dataCount-1] = next;
dataCount++;
if (dataCount == 9 && code == 0x04)
{
status = MessageStatus.Complete;
localTime = (long)BitConverter.ToInt64(timeBytes, 0);
}
if (dataCount == 17 && code == 0x05)
{
status = MessageStatus.Complete;
localTime = (long)BitConverter.ToInt64(timeBytes, 0);
remoteTime = (long)BitConverter.ToInt64(timeBytes, 8);
}
}
Times are sent and received as ticks which are 8 bytes long. Thus, the data component of code 0x04 messages is 9 bytes long, including the index byte. With two time values and an index byte, the data component of code 0x05 messages is 17 bytes long. Once the message is assembled, downstream processes obtain the collected values using the accessors Code, Index, LocalTime, and RemoteTime.
As previously explained, the purpose of the RemoteTimeReader program is to simulate a remote device collecting time values. As such, its design takes a path of minimalism. It is a console application that, once the C# .NET SerialPort class has been initialized and set up, runs within a while loop within the Main method. This while loop continues to execute for as long as the "Clear To Send" CTS line is up. The CTS line is a convenient way of checking the physical integrity of the communication link.
The first few lines of the while loop are shown below:
while (port.CtsHolding)
{
int totalBytes = port.BytesToRead;
if (totalBytes == 0)
{
Thread.Sleep(10);
if (sleepCount == 100)
{
if (!acknowledgementTimerElapsed())
return;
sleepCount = 0;
}
sleepCount++;
continue;
}
The first command within the while loop checks the port to determine if there is any data to be read from the port. If not, then the program sleeps for 10ms, increments a count, and starts the loop again. Once the sleep count reaches 100, indicating that 1 second has passed, then the method acknowledgementTimerElapsed is called. The acknowledgementTimerElapsed method is shown below:
static private bool acknowledgementTimerElapsed()
{
if (status == PortStatus.ConnectionEstablished)
status = PortStatus.ConnectionIdle;
else if (status == PortStatus.ConnectionIdle ||
status == PortStatus.NotConnected)
{
if (status == PortStatus.ConnectionIdle)
status = PortStatus.CheckConnected;
byte[] dataBytes = new byte[1];
dataBytes[0] = 0x01;
port.Write(dataBytes, 0, dataBytes.Length);
}
else if (status == PortStatus.CheckConnected)
{
Console.WriteLine("Communication lost - " +
"Timeout on acknowledge request");
return false;
}
return true;
}
The behaviour of this method is basically determined by the variable status. The status variable is initially set to the value Not Connected, indicating that RemoteTimeReader has not established a connection with LocalTimeReader. While RemoteTimeReader has a status of Not Connected, the acknowledgementTimerElapsed method will simply send out a Acknowledge Request message, effectively every second.
When a message is received, the status is changed to ConnectionEstablished by the ReceivedMessage method described later. When the acknowledgementTimerElapsed method is called and the status is ConnectionEstablished, it will change the status to ConnectionIdle. Thus, when acknowledgementTimerElapsed is called again and the status is still ConnectionIdle, this indicates that no messages have been received for a second. If this is the case, then the status will be changed to CheckConnected and an Acknowledge Request message will be sent.
If the acknowledgementTimerElapsed method is called and the status is CheckConnected, then no messages have been received for a second even though an Acknowledge Request message has been sent. If this is the case, then the method returns false, effectively closing the application.
Referring back to the while (port.CtsHolding) loop within the Main method, if there is data to be read from the port, then this data is assembled into a message using the Message class described earlier. Once a message is assembled, the ReceivedMessage method shown below is called.
static private void ReceivedMessage(Message receivedMessage)
{
if (receivedMessage.Code == 0x02)
{
status = PortStatus.ConnectionEstablished;
byte[] dataBytes = new byte[1];
dataBytes[0] = 0x03;
port.Write(dataBytes, 0, dataBytes.Length);
}
if (status == PortStatus.NotConnected)
return;
if (receivedMessage.Code == 0x04)
{
byte[] dataBytes = new byte[18];
dataBytes[0] = 0x05;
dataBytes[1] = receivedMessage.Index;
(BitConverter.GetBytes(receivedMessage.LocalTime)).CopyTo(dataBytes, 2);
(BitConverter.GetBytes(DateTime.Now.Ticks)).CopyTo(dataBytes, 10);
port.Write(dataBytes, 0, dataBytes.Length);
}
}
The RemoteTimeReader program should only ever receive Acknowledge (code 0x02) and Time Request (code 0x04) messages. If it receives an Acknowledge message, then it will respond by sending an Acknowledge Received message. If it receives a Time Request message, then it will respond with a Time message. This Time message is constructed using the index and time provided in the Time Request message, along with the current machine local time. If the status variable is set to NotConnected, then only Acknowledge messages are received.
The LocalTimeReader program is intended to be a PC based user interface that displays the data provided by the remote device. The serial port code at this end is therefore structured rather differently to the RemoteTimeReader program. The ConnectedSerialPort class inherits the .NET SerialPort class, and provides the SerialPort class with all the necessary set up parameters. The LocalTimeReaderPort class inherits the ConnectedSerialPort class and deals with the application specifics.
At this end, there is no infinite loop; instead, the ConnectedSerialPort class sets up events to deal with the CTS pin changes and data received. In addition, a one second timer is set up in the LocalTimeReaderPort class constructor to call the acknowledgementTimerElapsed method, which is much the same as the acknowledgementTimerElapsed method in the RemoteTimeReader program.
A data received event causes the ProcessDataReceived method within the LocalTimeReaderPort class to be called. The ProcessDataReceived method is shown below:
protected override void ProcessDataReceived(object sender, EventArgs e)
{
int totalBytes = this.BytesToRead;
if (totalBytes == 0)
return;
int byteCount = 0;
while (byteCount < totalBytes)
{
if (newMessage)
{
if (status != PortStatus.NotConnected)
status = PortStatus.ConnectionEstablished;
receivedMessage = new Message((byte)this.ReadByte());
if (receivedMessage.Status == Message.MessageStatus.InProgress)
newMessage = false;
else
ReceivedMessage(receivedMessage);
}
else
{
receivedMessage.Add((byte)this.ReadByte());
if (receivedMessage.Status != Message.MessageStatus.InProgress)
{
newMessage = true;
ReceivedMessage(receivedMessage);
}
}
byteCount++;
}
}
Not surprisingly, this code is almost identical to the code used in the RemoteTimeReader program when there is data to be read from the port. Once a received message has been assembled, the ReceivedMessage method is called. The ReceivedMessage method in the LocalTimeReaderPort class is shown below:
private void ReceivedMessage(Message receivedMessage)
{
if (receivedMessage.Code == 0x03)
status = PortStatus.ConnectionEstablished;
if (receivedMessage.Code == 0x01)
parent.ReceivedAcknowledgeRequest();
if (status == PortStatus.NotConnected)
return;
if (receivedMessage.Code == 0x05)
parent.ReceivedTime(receivedMessage.Index,
receivedMessage.LocalTime, receivedMessage.RemoteTime);
}
This method, of course, complements the method by the same name in the RemoteTimeReader program. Here, the possible received messages are: Acknowledge Requested (code 0x01), Acknowledge Received (code 0x03), and Time (code 0x05). If an Acknowledge Request or a Time message is received, then one of the MainForm methods ReceivedAcknowledgeRequest or ReceivedTime is called.
The LocalTimeReader interface is shown below:
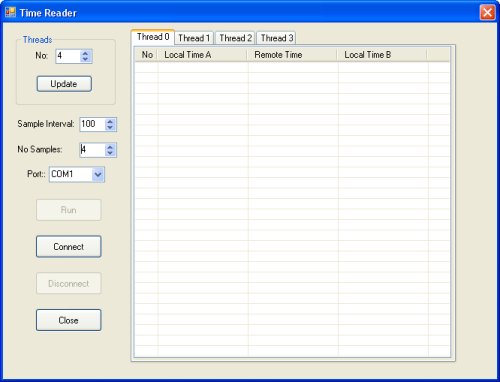
In order to simulate large data flows, several concurrent data collecting threads may be created by using the numeric up down control labeled No: and pressing Update. Each data collecting thread is represented by a tab page containing a list view. Each list view consists of four columns. The first column is merely a sequence number. The second column is the time at which the Time Request message was sent. The third column is the time collected at the remote end. The fourth column is the time that the Time message was received.
The user interface also facilitates adjustment of the sample interval and the number of samples. Connect is pressed once the RemoteTimeReader has been started at the remote end. Run is pressed to commence data collection.
The code that actually deals with each tab page display is contained in the ThreadPage class. The ThreadPage class, of course, inherits the .NET TabPage class. When Run is pressed on the main form, the Run method shown below is called for each tab page.
public void Run(LocalTimeReaderPort port, int interval, int noTicks)
{
localTimeReaderPort = port;
tickTotal = noTicks;
intervalTimer.Interval = interval;
listView.Items.Clear();
tickCount = 0;
localTimeReaderPort.SendTimeRequest(index, DateTime.Now.Ticks);
if (tickTotal > 1)
intervalTimer.Enabled = true;
}
The instance of LocalTimeReaderPort to be used for sending messages is passed in from the main form. The sample interval and the number of samples are also passed in, and are used to set up an interval timer. The first Time Request message is sent immediately.
The event handler for the interval timer is shown below:
void intervalTimer_Tick(object sender, EventArgs e)
{
if (localTimeReaderPort != null)
localTimeReaderPort.SendTimeRequest(index, DateTime.Now.Ticks);
if (tickCount == tickTotal)
{
intervalTimer.Enabled = false;
parent.RunStop();
}
tickCount++;
}
A Time Request message is, of course, sent every interval. Once the required number of messages have been sent, the timer is disabled and the RunStop method in the MainForm class is called.
When a Time message is received, the ReceivedTime method shown below is called.
public void ReceivedTime(long localTime, long remoteTime)
{
ListViewItem item = listView.Items.Add((listView.Items.Count+1).ToString());
if (localTime < DateTime.MinValue.Ticks || localTime > DateTime.MaxValue.Ticks)
item.SubItems.Add("Invalid Time");
else
item.SubItems.Add(GetTimeString(new DateTime(localTime)));
if (remoteTime < DateTime.MinValue.Ticks || remoteTime > DateTime.MaxValue.Ticks )
item.SubItems.Add("Invalid Time");
else
item.SubItems.Add(GetTimeString(new DateTime(remoteTime)));
item.SubItems.Add(GetTimeString(DateTime.Now));
}
This method adds the received data to the listview along with the current time.
Now to the MainForm class. The event handler for the Update button calls the RefreshTabPages method that is shown below:
public void RefreshTabPages()
{
tabControl.Controls.Clear();
for (byte iii=0; iii < (byte)updateNumericUpDown.Value; iii++)
tabControl.Controls.Add(new ThreadPage(iii, this));
}
The number of ThreadPage class instances added to the MainForm class tab control is determined by the updateNumericUpDown control labeled No:.
The event handler for the Connect button is shown below:
private void connectButton_Click(object sender, EventArgs e)
{
if (localTimeReaderPort != null)
localTimeReaderPort.ClosePort();
localTimeReaderPort = new LocalTimeReaderPort(this);
if (localTimeReaderPort.OpenPort(portComboBox.SelectedItem.ToString()))
{
connectButton.Enabled = false;
disconnectButton.Enabled = true;
}
else
MessageBox.Show("Port " + portComboBox.SelectedItem.ToString() + " failed to open");
}
When Connect is pressed, a new instance of the LocalTimeReaderPort class is created and the serial port is then opened.
When an Acknowledge Request message is received, the ReceivedAcknowledgeRequest method shown below is called.
public void ReceivedAcknowledgeRequest()
{
if (this.InvokeRequired)
BeginInvoke((MethodInvoker)(delegate { ReceivedAcknowledgeRequest(); }));
else
{
runButton.Enabled = true;
localTimeReaderPort.SendAcknowledge();
}
}
When an Acknowledge Request message is received, the Run button is enabled and an Acknowledge message is sent. Note that the BeginInvoke method is called to queue the method call into the GUI thread. Using the BeginInvoke method rather than the Invoke method means that code execution is not suspended until the call is complete.
When Run is pressed, the Run method for each instance of the ThreadPage class is called.
When a Time message is received, the ReceivedTime method shown below is called.
public void ReceivedTime(byte index, long localTime, long remoteTime)
{
if (this.InvokeRequired)
BeginInvoke((MethodInvoker)(
delegate { ReceivedTime(index, localTime, remoteTime); }));
else
{
((ThreadPage)tabControl.Controls[index]).ReceivedTime(localTime, remoteTime);
}
}
The ReceivedTime method in the appropriate instance of the ThreadPage class is called using the supplied index.
To set up a test, start by running the RemoteTimeReader program on the remote computer. If the serial port to be used is COM1, then no input parameters are required. I prefer to run console applications like RemoteTimeReader in a Command Prompt window to make it easier to read error messages from unexpected program terminations.
Once the RemoteTimeReader program is running, start the LocalTimeReader program on the local computer and press Connect. If all is well, then the Run button should be enabled within a few seconds. As a further check, press Run with the defaults of one sample and one thread and observe that a test result appears in the list view.
Once everything looks good, crack things up a bit. Set the number of threads to 10, the number of samples to 50, and the sample interval to 50. Press Run again. A result similar to that shown below should result.

The following observations can be made:
- The interval between the Local Time A values is around 110 ms., which is more than double the 50 ms. interval actually selected.
- The interval between the Remote Time values is around 188 ms. With 10 threads running, 10 Time Request messages each 10 bytes long are being sent per sample interval, and the data flow through the serial port is less than half the available speed of 9600 baud.
- The interval between the Local Time B values is around 170 to 220 ms.
- The round trip interval between Local Time A and Local Time B starts out at a reasonably quick 156 ms., but because the sample interval is quicker than the Remote Time interval, the last round trip ends up taking around 5 seconds.
Of particular concern here are the long intervals between the Remote Time values. Unfortunately, from the information collected, it cannot be determined whether the delay is at the local end or the remote end.
However, one thing is certain, if a real data collection device was running at the remote end of our 9600 baud line, then the LocalTimeReader program would have to cope with data arriving at more than twice the speed we are seeing here.
To speed the remote end up, the RemoteTimeReader program has been rewritten in the C programming language. I call it C rather than C++ because no classes are actually defined. The Win32 API requires a sequence of commands like CreateFile, GetCommState, SetCommState, GetCommTimeouts, and SetCommTimeouts. This command sequence is described in the CodeProject article: Non Overlapped Serial Port Communication using Win32, by Eshwar.
The only signficant points of difference between Eshwar's code and my code to be noted are firstly, the SetCommMask and WaitCommEvent commands are not used. Secondly, the read timeouts have been set to a rather low one second. As with the C# version, there is a main while loop. In the C case, it is as shown below:
while(true)
{
char buffer[1000];
DWORD readSize;
if (ReadFile(hSerialPort, buffer, 1000, &readSize, NULL) != 0)
{
.
.
.
.
}
if (!AcknowledgementTimerElapsed(hSerialPort))
break;
}
Execution stops at the ReadFile command until data is received or the command times out. Since read timeouts have been set to one second, execution will pass to the AcknowledgementTimerElapsed method once every second if no data is received. This AcknowledgementTimerElapsed method is pretty much a C version of the C# AcknowledgementTimerElapsed method described earlier.
If data is received, then the code within the curly brackets after the ReadFile command is executed. Once again, the business of parsing and acting on the data received is much the same as in the C# version.
To test the new code, run the RemoteTimeReaderC program on the remote computer. Once the RemoteTimeReaderC program is running, start the LocalTimeReader program on the local computer and press Connect.
Once again, when everything looks good, crack things up a bit. Set the number of threads to 10, the number of samples to 50, the sample interval to 50, and press Run. A result similar to that shown below should result.
The following observations can be made:
- As before, the interval between the Local Time A values is around 110 ms., which is more than double the 50 ms. interval actually selected.
- As before, the interval between the Remote Time values is around 188 ms.
- The first four Local Time B values are all the same, and then the interval between these values seems to settle at around 188 ms.
- Because the first four Local Time B values are all the same, the round trip interval between Local Time A and Local Time B starts out looking quite slow. However, because the interval between Local Time B values is more consistently 188 ms. than before, the last round trip time remains much the same.
If this were a simple case of a slow data link, then the obvious solution would be to either increase the baud rate or choose another technology. However, the reality is that our interface is not coping very well with a device running at 9600 baud. Perhaps the most important question is what do you want your interface to do? Since the whole purpose of a GUI is to interact with humans, it really does not have to be all that fast.
From practical experience, I know that the bundling of messages so that maybe four arrive "at the same time" is a real pain, because information from one of the earlier messages in the bundle may be required to modify the behaviour of the device.
Since it appears that the data flow between the two machines is still less than 9600 baud, the next thing to do is totally disconnect the GUI processes from the serial port processes. This will of course do nothing to speed up the GUI, but it will stop the bundling of messages that is presumably occurring during GUI related processes.
To facilitate the disconnect, the variables shown below are added to the LocalTimeReaderPort class.
private Queue queue1 = new Queue();
private Queue sendMessageQueue;
private Thread sendMessageThread;
private ManualResetEvent sendEvent = new ManualResetEvent(false);
private Queue queue2 = new Queue();
private Queue receiveMessageQueue;
private Thread receiveMessageThread;
private ManualResetEvent receivedEvent = new ManualResetEvent(false);
The variable sendMessageThread is the process thread used to handle outbound messages with the variables queue1, and sendMessageQueue is used to set up a thread safe queue. Similarly, the variable receiveMessageQueue is the process thread used to handle inbound messages with the variables queue2, and receiveMessageQueue is used to set up a thread safe queue. These threads and queues are set up in the LocalTimeReaderPort class constructor, as shown below:
sendMessageThread = new Thread(this.SendMessageThread);
sendMessageQueue = Queue.Synchronized(queue1);
sendMessageThread.Start();
receiveMessageThread = new Thread(this.ReceiveMessageThread);
receiveMessageQueue = Queue.Synchronized(queue2);
receiveMessageThread.Start();
The SendMessageThread method used by sendMessageThread is shown below:
private void SendMessageThread()
{
while (true)
{
while (sendMessageQueue.Count > 0)
{
SendMessage((byte[])sendMessageQueue.Dequeue());
}
sendEvent.WaitOne();
sendEvent.Reset();
}
}
The SendMessage method, which is the same as used in the Mark 1 version of LocalTimeReader is called and passed a message from the send queue. Execution then waits until sendEvent is set. This, of course, means that the methods that used to call the SendMessage method directly must now call the StartSendMessage method shown below:
private void StartSendMessage(byte[] data)
{
sendMessageQueue.Enqueue(data);
sendEvent.Set();
}
The new message is simply added to the queue and sendEvent is set.
The ReceiveMessageThread method used by receiveMessageThread is shown below:
private void ReceiveMessageThread()
{
while (true)
{
while (receiveMessageQueue.Count > 0)
{
ReceivedMessage((Message)receiveMessageQueue.Dequeue());
}
receivedEvent.WaitOne();
receivedEvent.Reset();
}
}
This method is quite similar to SendMessageThread. The ReceivedMessage method is called and passed messages from the receive queue. Execution then waits until receivedEvent is set. This of course means that the ProcessDataReceived method that use to call the ReceivedMessage method directly must now call the StartReceivedMessage method shown below instead.
private void ReceiveMessageThread()
{
while (true)
{
while (receiveMessageQueue.Count > 0)
{
ReceivedMessage((Message)receiveMessageQueue.Dequeue());
}
receivedEvent.WaitOne();
receivedEvent.Reset();
}
}
To test the new code, run the RemoteTimeReaderC program on the remote computer. Once the RemoteTimeReaderC program is running, start the LocalTimeReaderGT program on the local computer and press Connect.
Once again, when everything looks good, crack things up a bit. Set the number of threads to 10, the number of samples to 50, the sample interval to 50, and press Run. A result similar to that shown below should result.
The following observations can be made:
- The interval between the Local Time A values is now down to 60 ms., which is reasonably close to the 50 ms. interval actually selected.
- The interval between the Remote Time values is still around 188 ms.
- The interval between the first two Local Time B values is rather high, and then the interval between these values seems to settle at around 188 ms.
- The first time, the round trip interval between Local Time A and Local Time B starts out looking quite slow at 828 ms. The last round trip value is certainly slow at around 8 seconds. However, the sample rate is now nearly twice what it was, so the 8 seconds round trip time might be regarded as good in proportion.
Generally speaking, not a lot has been done to speed things up. However, the sampling rate is now close to on time, and the GUI is running smoothly, with fresh results being displayed at regular intervals.
I understand that a DataReceived event is raised by the .NET SerialPort class whenever a complete byte is available for reading. Each event starts a new process thread. However, when all of the available process threads are running, each new byte of received data is buffered until a process thread becomes available. This explains the bundling of messages seen in the second series of tests.
So it seems that some process in version 1 of LocalTimeReader was slow to release the process threads required by the DataReceived event. The only solution then was to minimize the time taken by the DataReceived event handler by reducing its task to simply adding the data to a queue.
To enable the GUI to run smoothly, it seems that it is necessary to have a queue for outbound data as well.

