This article provides an alternate C language state machine implementation based on the ideas presented within the article “State Machine Design in C++”. The design is suitable for any platform, embedded or PC, with any C compiler.
Introduction
In 2000, I wrote an article entitled "State Machine Design in C++" for C/C++ Users Journal (R.I.P.). Interestingly, that old article is still available and (at the time of writing this article), the #1 hit on Google when searching for C++ state machine. The article was written over 15 years ago, but I continue to use the basic idea on numerous projects. It's compact, easy to understand and, in most cases, has just enough features to accomplish what I need.
Sometimes C is the right tool for the job. This article provides an alternate C language state machine implementation based on the ideas presented within the article “State Machine Design in C++”. The design is suitable for any platform, embedded or PC, with any C compiler. This state machine has the following features:
- C language – state machine written in C
- Compact – consumes a minimum amount of resources
- Objects – supports multiple instantiations of a single state machine type
- Transition tables – transition tables precisely control state transition behavior
- Events – every event is a simple function with any argument types
- State action – every state action is a separate function with a single, unique event data argument if desired
- Guards/entry/exit actions – optionally a state machine can use guard conditions and separate entry/exit action functions for each state
- Macros – optional multiline macro support simplifies usage by automating the code "machinery"
- Error checking – compile time and runtime checks catch mistakes early
- Thread-safe – adding software locks to make the code thread-safe is easy
The article is not a tutorial on the best design decomposition practices for software state machines. I'll be focusing on state machine code and simple examples with just enough complexity to facilitate understanding the features and usage.
CMake is used to create the build files. CMake is free and open-source software. Windows, Linux and other toolchains are supported. See the CMakeLists.txt file for more information.
See GitHub for latest source code:
See other related GitHub repositories:
Background
A common design technique in the repertoire of most programmers is the venerable finite state machine (FSM). Designers use this programming construct to break complex problems into manageable states and state transitions. There are innumerable ways to implement a state machine.
A switch statement provides one of the easiest to implement and most common version of a state machine. Here, each case within the switch statement becomes a state, implemented something like:
switch (currentState) {
case ST_IDLE:
break;
case ST_STOP:
break;
}
This method is certainly appropriate for solving many different design problems. When employed on an event driven, multithreaded project, however, state machines of this form can be quite limiting.
The first problem revolves around controlling what state transitions are valid and which ones are invalid. There is no way to enforce the state transition rules. Any transition is allowed at any time, which is not particularly desirable. For most designs, only a few transition patterns are valid. Ideally, the software design should enforce these predefined state sequences and prevent the unwanted transitions. Another problem arises when trying to send data to a specific state. Since the entire state machine is located within a single function, sending additional data to any given state proves difficult. And lastly, these designs are rarely suitable for use in a multithreaded system. The designer must ensure the state machine is called from a single thread of control.
Why Use a State Machine?
Implementing code using a state machine is an extremely handy design technique for solving complex engineering problems. State machines break down the design into a series of steps, or what are called states in state-machine lingo. Each state performs some narrowly defined task. Events, on the other hand, are the stimuli, which cause the state machine to move, or transition, between states.
To take a simple example, which I will use throughout this article, let's say we are designing motor-control software. We want to start and stop the motor, as well as change the motor's speed. Simple enough. The motor control events to be exposed to the client software will be as follows:
- Set Speed – sets the motor going at a specific speed
- Halt – stops the motor
These events provide the ability to start the motor at whatever speed desired, which also implies changing the speed of an already moving motor. Or we can stop the motor altogether. To the motor-control module, these two events, or functions, are considered external events. To a client using our code, however, these are just plain functions.
These events are not state machine states. The steps required to handle these two events are different. In this case, the states are:
- Idle — the motor is not spinning but is at rest
- Start — starts the motor from a dead stop
- Turn on motor power
- Set motor speed
- Change Speed — adjust the speed of an already moving motor
- Stop — stop a moving motor
- Turn off motor power
- Go to the Idle state
As can be seen, breaking the motor control into discreet states, as opposed to having one monolithic function, we can more easily manage the rules of how to operate the motor.
Every state machine has the concept of a "current state." This is the state the state machine currently occupies. At any given moment in time, the state machine can be in only a single state. Every instance of a particular state machine instance can set the initial state when defined. That initial state, however, does not execute during object creation. Only an event sent to the state machine causes a state function to execute.
To graphically illustrate the states and events, we use a state diagram. Figure 1 below shows the state transitions for the motor control module. A box denotes a state and a connecting arrow indicates the event transitions. Arrows with the event name listed are external events, whereas unadorned lines are considered internal events. (I cover the differences between internal and external events later in the article.)
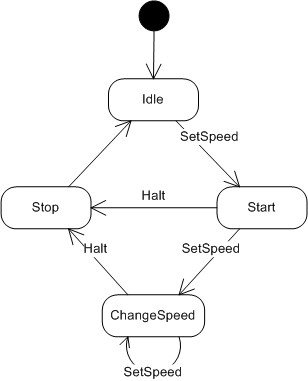
Figure 1: Motor state diagram
As you can see, when an event comes in the state transition that occurs depends on state machine's current state. When a SetSpeed event comes in, for instance, and the motor is in the Idle state, it transitions to the Start state. However, that same SetSpeed event generated while the current state is Start transitions the motor to the ChangeSpeed state. You can also see that not all state transitions are valid. For instance, the motor can't transition from ChangeSpeed to Idle without first going through the Stop state.
In short, using a state machine captures and enforces complex interactions, which might otherwise be difficult to convey and implement.
Internal and External Events
As I mentioned earlier, an event is the stimulus that causes a state machine to transition between states. For instance, a button press could be an event. Events can be broken out into two categories: external and internal. The external event, at its most basic level, is a function call into a state-machine module. These functions are public and are called from the outside or from code external to the state-machine object. Any thread or task within a system can generate an external event. If the external event function call causes a state transition to occur, the state will execute synchronously within the caller's thread of control. An internal event, on the other hand, is self-generated by the state machine itself during state execution.
A typical scenario consists of an external event being generated, which, again, boils down to a function call into the module's public interface. Based upon the event being generated and the state machine's current state, a lookup is performed to determine if a transition is required. If so, the state machine transitions to the new state and the code for that state executes. At the end of the state function, a check is performed to determine whether an internal event was generated. If so, another transition is performed and the new state gets a chance to execute. This process continues until the state machine is no longer generating internal events, at which time the original external event function call returns. The external event and all internal events, if any, execute within the caller's thread of control.
Once the external event starts the state machine executing, it cannot be interrupted by another external event until the external event and all internal events have completed execution if locks are used. This run to completion model provides a multithread-safe environment for the state transitions. Semaphores or mutexes can be used in the state machine engine to block other threads that might be trying to be simultaneously access the same state machine instance. See source code function _SM_ExternalEvent() comments for where the locks go.
Event Data
When an event is generated, it can optionally attach event data to be used by the state function during execution. Event data is a single const or non-const pointer to any built-in or user-defined data type.
Once the state has completed execution, the event data is considered used up and must be deleted. Therefore, any event data sent to a state machine must be dynamically created via SM_XAlloc(). The state machine engine automatically frees allocated event data using SM_XFree().
State Transitions
When an external event is generated, a lookup is performed to determine the state transition course of action. There are three possible outcomes to an event: new state, event ignored, or cannot happen. A new state causes a transition to a new state where it is allowed to execute. Transitions to the existing state are also possible, which means the current state is re-executed. For an ignored event, no state executes. However, the event data, if any, is deleted. The last possibility, cannot happen, is reserved for situations where the event is not valid given the current state of the state machine. If this occurs, the software faults.
In this implementation, internal events are not required to perform a validating transition lookup. The state transition is assumed to be valid. You could check for both valid internal and external event transitions, but in practice, this just takes more storage space and generates busywork for very little benefit. The real need for validating transitions lies in the asynchronous, external events where a client can cause an event to occur at an inappropriate time. Once the state machine is executing, it cannot be interrupted. It is under the control of the private implementation, thereby making transition checks unnecessary. This gives the designer the freedom to change states, via internal events, without the burden of updating transition tables.
StateMachine Module
The state machine source code is contained within the StateMachine.c and StateMachine.h files. The code below shows the partial header. The StateMachine header contains various preprocessor multiline macros to ease implementation of a state machine.
enum { EVENT_IGNORED = 0xFE, CANNOT_HAPPEN = 0xFF };
typedef void NoEventData;
typedef struct
{
const CHAR* name;
const BYTE maxStates;
const struct SM_StateStruct* stateMap;
const struct SM_StateStructEx* stateMapEx;
} SM_StateMachineConst;
typedef struct
{
const CHAR* name;
void* pInstance;
BYTE newState;
BYTE currentState;
BOOL eventGenerated;
void* pEventData;
} SM_StateMachine;
typedef void (*SM_StateFunc)(SM_StateMachine* self, void* pEventData);
typedef BOOL (*SM_GuardFunc)(SM_StateMachine* self, void* pEventData);
typedef void (*SM_EntryFunc)(SM_StateMachine* self, void* pEventData);
typedef void (*SM_ExitFunc)(SM_StateMachine* self);
typedef struct SM_StateStruct
{
SM_StateFunc pStateFunc;
} SM_StateStruct;
typedef struct SM_StateStructEx
{
SM_StateFunc pStateFunc;
SM_GuardFunc pGuardFunc;
SM_EntryFunc pEntryFunc;
SM_ExitFunc pExitFunc;
} SM_StateStructEx;
#define SM_Event(_smName_, _eventFunc_, _eventData_) \
_eventFunc_(&_smName_##Obj, _eventData_)
#define SM_InternalEvent(_newState_, _eventData_) \
_SM_InternalEvent(self, _newState_, _eventData_)
#define SM_GetInstance(_instance_) \
(_instance_*)(self->pInstance);
void _SM_ExternalEvent(SM_StateMachine* self,
const SM_StateMachineConst* selfConst, BYTE newState, void* pEventData);
void _SM_InternalEvent(SM_StateMachine* self, BYTE newState, void* pEventData);
void _SM_StateEngine(SM_StateMachine* self, const SM_StateMachineConst* selfConst);
void _SM_StateEngineEx(SM_StateMachine* self, const SM_StateMachineConst* selfConst);
#define SM_DECLARE(_smName_) \
extern SM_StateMachine _smName_##Obj;
#define SM_DEFINE(_smName_, _instance_) \
SM_StateMachine _smName_##Obj = { #_smName_, _instance_, \
0, 0, 0, 0 };
#define EVENT_DECLARE(_eventFunc_, _eventData_) \
void _eventFunc_(SM_StateMachine* self, _eventData_* pEventData);
#define EVENT_DEFINE(_eventFunc_, _eventData_) \
void _eventFunc_(SM_StateMachine* self, _eventData_* pEventData)
#define STATE_DECLARE(_stateFunc_, _eventData_) \
static void ST_##_stateFunc_(SM_StateMachine* self, _eventData_* pEventData);
#define STATE_DEFINE(_stateFunc_, _eventData_) \
static void ST_##_stateFunc_(SM_StateMachine* self, _eventData_* pEventData)
The SM_Event() macro is used to generate external events whereas SM_InternalEvent() generates an internal event during state function execution. SM_GetInstance() obtains a pointer to the current state machine object.
SM_DECLARE and SM_DEFINE are used to create a state machine instance. EVENT_DECLARE and EVENT_DEFINE create external event functions. And finally, STATE_DECLARE and STATE_DEFINE create state functions.
Motor Example
Motor implements our hypothetical motor-control state machine, where clients can start the motor, at a specific speed, and stop the motor. The Motor header interface is shown below:
#include "StateMachine.h"
typedef struct
{
INT currentSpeed;
} Motor;
typedef struct
{
INT speed;
} MotorData;
EVENT_DECLARE(MTR_SetSpeed, MotorData)
EVENT_DECLARE(MTR_Halt, NoEventData)
The Motor source file uses macros to simplify usage by hiding the required state machine machinery.
enum States
{
ST_IDLE,
ST_STOP,
ST_START,
ST_CHANGE_SPEED,
ST_MAX_STATES
};
STATE_DECLARE(Idle, NoEventData)
STATE_DECLARE(Stop, NoEventData)
STATE_DECLARE(Start, MotorData)
STATE_DECLARE(ChangeSpeed, MotorData)
BEGIN_STATE_MAP(Motor)
STATE_MAP_ENTRY(ST_Idle)
STATE_MAP_ENTRY(ST_Stop)
STATE_MAP_ENTRY(ST_Start)
STATE_MAP_ENTRY(ST_ChangeSpeed)
END_STATE_MAP(Motor)
EVENT_DEFINE(MTR_SetSpeed, MotorData)
{
BEGIN_TRANSITION_MAP TRANSITION_MAP_ENTRY(ST_START) TRANSITION_MAP_ENTRY(CANNOT_HAPPEN) TRANSITION_MAP_ENTRY(ST_CHANGE_SPEED) TRANSITION_MAP_ENTRY(ST_CHANGE_SPEED) END_TRANSITION_MAP(Motor, pEventData)
}
EVENT_DEFINE(MTR_Halt, NoEventData)
{
BEGIN_TRANSITION_MAP TRANSITION_MAP_ENTRY(EVENT_IGNORED) TRANSITION_MAP_ENTRY(CANNOT_HAPPEN) TRANSITION_MAP_ENTRY(ST_STOP) TRANSITION_MAP_ENTRY(ST_STOP) END_TRANSITION_MAP(Motor, pEventData)
}
External Events
MTR_SetSpeed and MTR_Halt are considered external events into the Motor state machine. MTR_SetSpeed takes a pointer to MotorData event data, containing the motor speed. This data structure will be freed using SM_XFree() upon completion of the state processing, so it is imperative that it be created using SM_XAlloc() before the function call is made.
State Enumerations
Each state function must have an enumeration associated with it. These enumerations are used to store the current state of the state machine. In Motor, States provides these enumerations, which are used later for indexing into the transition map and state map lookup tables.
State Functions
State functions implement each state — one state function per state-machine state. STATE_DECLARE is used to declare the state function interface and STATE_DEFINE defines the implementation.
STATE_DEFINE(Idle, NoEventData)
{
printf("%s ST_Idle\n", self->name);
}
STATE_DEFINE(Stop, NoEventData)
{
Motor* pInstance = SM_GetInstance(Motor);
pInstance->currentSpeed = 0;
printf("%s ST_Stop: %d\n", self->name, pInstance->currentSpeed);
SM_InternalEvent(ST_IDLE, NULL);
}
STATE_DEFINE(Start, MotorData)
{
ASSERT_TRUE(pEventData);
Motor* pInstance = SM_GetInstance(Motor);
pInstance->currentSpeed = pEventData->speed;
printf("%s ST_Start: %d\n", self->name, pInstance->currentSpeed);
}
STATE_DEFINE(ChangeSpeed, MotorData)
{
ASSERT_TRUE(pEventData);
Motor* pInstance = SM_GetInstance(Motor);
pInstance->currentSpeed = pEventData->speed;
printf("%s ST_ChangeSpeed: %d\n", self->name, pInstance->currentSpeed);
}
STATE_DECLARE and STATE_DEFINE use two arguments. The first argument is the state function name. The second argument is the event data type. If no event data is required, use NoEventData. Macros are also available for creating guard, exit and entry actions which are explained later in the article.
The SM_GetInstance() macro obtains an instance to the state machine object. The argument to the macro is the state machine name.
In this implementation, all state machine functions must adhere to these signatures, which are as follows:
typedef void (*SM_StateFunc)(SM_StateMachine* self, void* pEventData);
typedef BOOL (*SM_GuardFunc)(SM_StateMachine* self, void* pEventData);
typedef void (*SM_EntryFunc)(SM_StateMachine* self, void* pEventData);
typedef void (*SM_ExitFunc)(SM_StateMachine* self);
Each SM_StateFunc accepts a pointer to a SM_StateMachine object and event data. If NoEventData is used, the pEventData argument will be NULL. Otherwise, the pEventData argument is of the type specified in STATE_DEFINE.
In Motor’s Start state function, the STATE_DEFINE(Start, MotorData) macro expands to:
void ST_Start(SM_StateMachine* self, MotorData* pEventData)
Notice that every state function has self and pEventData arguments. self is a pointer to the state machine object and pEventData is the event data. Also note that the macro prepends “ST_” to the state name to create the function ST_Start().
Similarly, the Stop state function STATE_DEFINE(Stop, NoEventData) is expands to:
void ST_Stop(SM_StateMachine* self, void* pEventData)
Stop doesn't accept event data so the pEventData argument is void*.
Three characters are added to each state/guard/entry/exit function automatically within the macros. For instance, if declaring a function using STATE_DEFINE(Idle, NoEventData) the actual state function name is called ST_Idle().
ST_ - state function prepend charactersGD_ - guard function prepend charactersEN_ - entry function prepend charactersEX_ - exit function prepend characters
SM_GuardFunc and SM_Entry function typedef’s also accept event data. SM_ExitFunc is unique in that no event data is allowed.
State Map
The state-machine engine knows which state function to call by using the state map. The state map maps the currentState variable to a specific state function. For instance, if currentState is 2, then the third state-map function pointer entry will be called (counting from zero). The state map table is created using these three macros:
BEGIN_STATE_MAP
STATE_MAP_ENTRY
END_STATE_MAP
BEGIN_STATE_MAP starts the state map sequence. Each STATE_MAP_ENTRY has a state function name argument. END_STATE_MAP terminates the map. The state map for Motor is shown below:
BEGIN_STATE_MAP(Motor)
STATE_MAP_ENTRY(ST_Idle)
STATE_MAP_ENTRY(ST_Stop)
STATE_MAP_ENTRY(ST_Start)
STATE_MAP_ENTRY(ST_ChangeSpeed)
END_STATE_MAP
Alternatively, guard/entry/exit features require utilizing the _EX (extended) version of the macros.
BEGIN_STATE_MAP_EX
STATE_MAP_ENTRY_EX or STATE_MAP_ENTRY_ALL_EX
END_STATE_MAP_EX
The STATE_MAP_ENTRY_ALL_EX macro has four arguments for the state action, guard condition, entry action and exit action in that order. The state action is mandatory but the other actions are optional. If a state doesn't have an action, then use 0 for the argument. If a state doesn't have any guard/entry/exit options, the STATE_MAP_ENTRY_EX macro defaults all unused options to 0. The macro snippet below is for an advanced example presented later in the article.
BEGIN_STATE_MAP_EX(CentrifugeTest)
STATE_MAP_ENTRY_ALL_EX(ST_Idle, 0, EN_Idle, 0)
STATE_MAP_ENTRY_EX(ST_Completed)
STATE_MAP_ENTRY_EX(ST_Failed)
STATE_MAP_ENTRY_ALL_EX(ST_StartTest, GD_StartTest, 0, 0)
STATE_MAP_ENTRY_EX(ST_Acceleration)
STATE_MAP_ENTRY_ALL_EX(ST_WaitForAcceleration, 0, 0, EX_WaitForAcceleration)
STATE_MAP_ENTRY_EX(ST_Deceleration)
STATE_MAP_ENTRY_ALL_EX(ST_WaitForDeceleration, 0, 0, EX_WaitForDeceleration)
END_STATE_MAP_EX(CentrifugeTest)
Don’t forget to add the prepended characters (ST_, GD_, EN_ or EX_) for each function.
State Machine Objects
In C++, objects are integral to the language. Using C, you have to work a bit harder to accomplish similar behavior. This C language state machine supports multiple state machine objects (or instances) instead of having a single, static state machine implementation.
The SM_StateMachine data structure stores state machine instance data; one object per state machine instance. The SM_StateMachineConst data structure stores constant data; one constant object per state machine type.
The state machine is defined using SM_DEFINE macro. The first argument is the state machine name. The second argument is a pointer to a user defined state machine structure, or NULL if no user object.
#define SM_DEFINE(_smName_, _instance_) \
SM_StateMachine _smName_##Obj = { #_smName_, _instance_, \
0, 0, 0, 0 };
In this example, the state machine name is Motor and two objects and two state machines are created.
static Motor motorObj1;
static Motor motorObj2;
SM_DEFINE(Motor1SM, &motorObj1)
SM_DEFINE(Motor2SM, &motorObj2)
Each motor object handles state execution independent of the other. The Motor structure is used to store state machine instance-specific data. Within a state function, use SM_GetInstance() to obtain a pointer to the Motor object at runtime.
Motor* pInstance = SM_GetInstance(Motor);
pInstance->currentSpeed = pEventData->speed;
Transition Map
The last detail to attend to are the state transition rules. How does the state machine know what transitions should occur? The answer is the transition map. A transition map is lookup table that maps the currentState variable to a state enum constant. Every external event function has a transition map table created with three macros:
BEGIN_TRANSITION_MAP
TRANSITION_MAP_ENTRY
END_TRANSITION_MAP
The MTR_Halt event function in Motor defines the transition map as:
EVENT_DEFINE(MTR_Halt, NoEventData)
{
BEGIN_TRANSITION_MAP TRANSITION_MAP_ENTRY(EVENT_IGNORED) TRANSITION_MAP_ENTRY(CANNOT_HAPPEN) TRANSITION_MAP_ENTRY(ST_STOP) TRANSITION_MAP_ENTRY(ST_STOP) END_TRANSITION_MAP(Motor, pEventData)
}
BEGIN_TRANSITION_MAP starts the map. Each TRANSITION_MAP_ENTRY that follows indicates what the state machine should do based upon the current state. The number of entries in each transition map table must match the number of state functions exactly. In our example, we have four state functions, so we need four transition map entries. The location of each entry matches the order of state functions defined within the state map. Thus, the first entry within the MTR_Halt function indicates an EVENT_IGNORED as shown below:
TRANSITION_MAP_ENTRY (EVENT_IGNORED)
This is interpreted as "If a Halt event occurs while the current state is state Idle, just ignore the event."
Similarly, the third entry in the map is:
TRANSITION_MAP_ENTRY (ST_STOP) // ST_Start
This indicates "If a Halt event occurs while current is state Start, then transition to state Stop."
END_TRANSITION_MAP terminates the map. The first argument to this macro is the state machine name. The second argument is the event data.
The C_ASSERT() macro is used within END_TRANSITION_MAP. If there is a mismatch between the number of state machine states and the number of transition map entries, a compile time error is generated.
New State Machine Steps
Creating a new state machine requires a few basic high-level steps:
- Create a
States enumeration with one entry per state function - Define state functions
- Define event functions
- Create one state map lookup table using the
STATE_MAP macros - Create one transition map lookup table for each external event function using the
TRANSITION_MAP macros
State Engine
The state engine executes the state functions based upon events generated. The transition map is an array of SM_StateStruct instances indexed by the currentState variable. When the _SM_StateEngine() function executes, it looks up the correct state function within the SM_StateStruct array. After the state function has a chance to execute, it frees the event data, if any, before checking to see if any internal events were generated via SM_InternalEvent().
void _SM_StateEngine(SM_StateMachine* self, SM_StateMachineConst* selfConst)
{
void* pDataTemp = NULL;
ASSERT_TRUE(self);
ASSERT_TRUE(selfConst);
while (self->eventGenerated)
{
ASSERT_TRUE(self->newState < selfConst->maxStates);
SM_StateFunc state = selfConst->stateMap[self->newState].pStateFunc;
pDataTemp = self->pEventData;
self->pEventData = NULL;
self->eventGenerated = FALSE;
self->currentState = self->newState;
ASSERT_TRUE(state != NULL);
state(self, pDataTemp);
if (pDataTemp)
{
SM_XFree(pDataTemp);
pDataTemp = NULL;
}
}
}
The state engine logic for guard, entry, state, and exit actions is expressed by the following sequence. The _SM_StateEngine() engine implements only #1 and #5 below. The extended _SM_StateEngineEx() engine uses the entire logic sequence.
- Evaluate the state transition table. If
EVENT_IGNORED, the event is ignored and the transition is not performed. If CANNOT_HAPPEN, the software faults. Otherwise, continue with next step. - If a guard condition is defined, execute the guard condition function. If the guard condition returns
FALSE, the state transition is ignored and the state function is not called. If the guard returns TRUE, or if no guard condition exists, the state function will be executed. - If transitioning to a new state and an exit action is defined for the current state, call the current state exit action function.
- If transitioning to a new state and an entry action is defined for the new state, call the new state entry action function.
- Call the state action function for the new state. The new state is now the current state.
Generating Events
At this point, we have a working state machine. Let's see how to generate events to it. An external event is generated by dynamically creating the event data structure using SM_XAlloc(), assigning the structure member variables, and calling the external event function using the SM_Event() macro. The following code fragment shows how a synchronous call is made.
MotorData* data;
data = SM_XAlloc(sizeof(MotorData));
data->speed = 100;
SM_Event(Motor1SM, MTR_SetSpeed, data);
The SM_Event() first argument is the state machine name. The second argument is the event function to invoke. The third argument is the event data, or NULL if no data.
To generate an internal event from within a state function, call SM_InternalEvent(). If the destination doesn't accept event data, then the last argument is NULL. Otherwise, create the event data using SM_XAlloc().
SM_InternalEvent(ST_IDLE, NULL);
In the example above, once the state function completes execution, the state machine will transition to the ST_Idle state. If, on the other hand, event data needs to be sent to the destination state, then the data structure needs to be created on the heap and passed in as an argument.
MotorData* data;
data = SM_XAlloc(sizeof(MotorData));
data->speed = 100;
SM_InternalEvent(ST_CHANGE_SPEED, data);
No Heap Usage
All state machine event data must be dynamically created. However, on some systems, using the heap is undesirable. The included x_allocator module is a fixed block memory allocator that eliminates heap usage. Define USE_SM_ALLOCATOR within StateMachine.c to use the fixed block allocator. See the References section below for x_allocator information.
CentrifugeTest Example
The CentrifugeTest example shows how an extended state machine is created using guard, entry and exit actions. The state diagram is shown below:

Figure 2: CentrifugeTest state diagram
A CentrifgeTest object and state machine is created. The only difference here is that the state machine is a singleton, meaning the object is private and only one instance of CentrifugeTest can be created. This is unlike the Motor state machine where multiple instances are allowed.
typedef struct
{
INT speed;
BOOL pollActive;
} CentrifugeTest;
CentrifugeTest centrifugeTestObj;
SM_DEFINE(CentrifugeTestSM, ¢rifugeTestObj)
The extended state machine uses ENTRY_DECLARE, GUARD_DECLARE and EXIT_DECLARE macros.
enum States
{
ST_IDLE,
ST_COMPLETED,
ST_FAILED,
ST_START_TEST,
ST_ACCELERATION,
ST_WAIT_FOR_ACCELERATION,
ST_DECELERATION,
ST_WAIT_FOR_DECELERATION,
ST_MAX_STATES
};
STATE_DECLARE(Idle, NoEventData)
ENTRY_DECLARE(Idle, NoEventData)
STATE_DECLARE(Completed, NoEventData)
STATE_DECLARE(Failed, NoEventData)
STATE_DECLARE(StartTest, NoEventData)
GUARD_DECLARE(StartTest, NoEventData)
STATE_DECLARE(Acceleration, NoEventData)
STATE_DECLARE(WaitForAcceleration, NoEventData)
EXIT_DECLARE(WaitForAcceleration)
STATE_DECLARE(Deceleration, NoEventData)
STATE_DECLARE(WaitForDeceleration, NoEventData)
EXIT_DECLARE(WaitForDeceleration)
BEGIN_STATE_MAP_EX(CentrifugeTest)
STATE_MAP_ENTRY_ALL_EX(ST_Idle, 0, EN_Idle, 0)
STATE_MAP_ENTRY_EX(ST_Completed)
STATE_MAP_ENTRY_EX(ST_Failed)
STATE_MAP_ENTRY_ALL_EX(ST_StartTest, GD_StartTest, 0, 0)
STATE_MAP_ENTRY_EX(ST_Acceleration)
STATE_MAP_ENTRY_ALL_EX(ST_WaitForAcceleration, 0, 0, EX_WaitForAcceleration)
STATE_MAP_ENTRY_EX(ST_Deceleration)
STATE_MAP_ENTRY_ALL_EX(ST_WaitForDeceleration, 0, 0, EX_WaitForDeceleration)
END_STATE_MAP_EX(CentrifugeTest)
Notice the _EX extended state map macros so the guard/entry/exit features are supported. Each guard/entry/exit DECLARE macro must be matched with the DEFINE. For instance, a guard condition for the StartTest state function is declared as:
GUARD_DECLARE(StartTest, NoEventData)
The guard condition function returns TRUE if the state function is to be executed or FALSE otherwise.
GUARD_DEFINE(StartTest, NoEventData)
{
printf("%s GD_StartTest\n", self->name);
if (centrifugeTestObj.speed == 0)
return TRUE; else
return FALSE; }
Multithread Safety
To prevent preemption by another thread when the state machine is in the process of execution, the StateMachine module can use locks within the _SM_ExternalEvent() function. Before the external event is allowed to execute, a semaphore can be locked. When the external event and all internal events have been processed, the software lock is released, allowing another external event to enter the state machine instance.
Comments indicate where the lock and unlock should be placed if the application is multithreaded and mutiple threads are able to access a single state machine instance. Note that each StateMachine object should have its own instance of a software lock. This prevents a single instance from locking and preventing all other StateMachine objects from executing. Software locks are only required if a StateMachine instance is called by multiple threads of control. If not, then locks are not required.
Conclusion
Implementing a state machine using this method as opposed to the old switch statement style may seem like extra effort. However, the payoff is in a more robust design that is capable of being employed uniformly over an entire multithreaded system. Having each state in its own function provides easier reading than a single huge switch statement, and allows unique event data to be sent to each state. In addition, validating state transitions prevents client misuse by eliminating the side effects caused by unwanted state transitions.
This C language version is a close translation of the C++ implementation I’ve used for many years on different projects. Consider the C++ implementation within the References section if using C++.
References
History
- 2nd February, 2019: Initial release
- 1st May, 2021: Added getter feature and fixed compiler warnings. Updated source code.

