Introduction
Microsoft discourages the use of DirectInput for keyboard and mouse input in games, but it is still recommended to process data from a legacy joystick, or other game controller. New applications should use the Raw Input API, i.e., to take advantage of computer mice generating data at 800 DPI or even more. Additionally, Microsoft introduced XInput to allow applications to receive input from the Xbox 360 Controller. Hence, game developers have to cope with up to three different APIs when designing their input system.
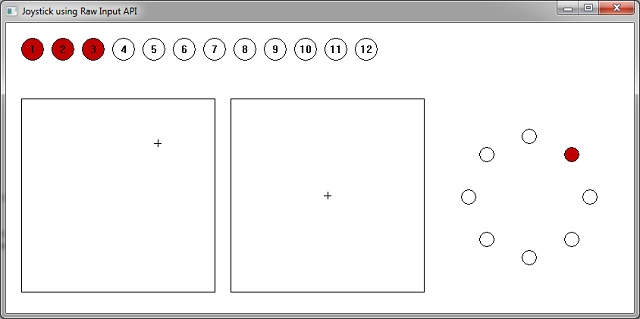
In this article, I will show how to use the Raw Input API to process joystick/gamepad data, making at least the use of DirectInput obsolete.
Background
With Windows XP, Microsoft introduced the Raw Input API to support other Human Interface Devices (HIDs) than the traditional keyboard and mouse. An application can use this API to get data from any HID one can imagine. But aside from keyboard and mouse input, the API exposes no structures or functions to interpret the data coming from the devices, thus making it useless to game applications that want to make use of the vast number of different joysticks and gamepads available. The Raw Input API documentation does not mention how to retrieve such valuable information as the number of buttons, the number of axes, the existence of a hat switch, and so on. (I guess this is why it's called "raw" ;-) )
In the effort of developing a game engine, I wanted to add support for my Logitech RumblePad 2. For mouse and keyboard input, I have already used the Raw Input API, so it seemed logical to look at it first before trying to implement a second branch of code that manages DirectInput and its device objects. In the end, I came up with a solution using the Raw Input API and the HIDClass driver (see Human Input Devices in the Windows Driver Kit).
The next few sections of this article will show a basic way of retrieving raw joystick data and how to interpret it.
Before Using the Code
As already mentioned, the sample application works closely with the HIDClass driver. To compile the code, you must download the Windows Driver Kit (WDK) from the Microsoft website and set the project paths accordingly. You will need to link to hid.lib and if you get a whole lot of compile errors, you may have forgotten to include the "\inc\crt" path.
Step 1: Register for Joystick Devices
The first thing every application using Raw Input API does is to register for the kind of devices it is interested in getting data from.
case WM_CREATE:
{
RAWINPUTDEVICE rid;
rid.usUsagePage = 1;
rid.usUsage = 4; rid.dwFlags = 0;
rid.hwndTarget = hWnd;
if(!RegisterRawInputDevices(&rid, 1, sizeof(RAWINPUTDEVICE)))
return -1;
}
return 0;
This is the most simple part. For joystick devices, we only need to set usUsagePage = 1 and usUsage = 4. The terms Usage Page and Usage have their origin in the HID Usage Tables of the USB Implementers' Forum. They specify the various types of input devices and their controls, i.e., 1 is the id of the Generic Desktop Controls Page and 4 is the id of the Joystick Usage Name. In addition, to receive the WM_INPUT message, we set hwndTarget to the handle of our window.
Step 2: Retrieve the Device Data
In the WM_INPUT case, we obtain a pointer to the RAWINPUT structure containing the joystick's data.
case WM_INPUT:
{
PRAWINPUT pRawInput;
UINT bufferSize;
HANDLE hHeap;
GetRawInputData((HRAWINPUT)lParam, RID_INPUT, NULL,
&bufferSize, sizeof(RAWINPUTHEADER));
hHeap = GetProcessHeap();
pRawInput = (PRAWINPUT)HeapAlloc(hHeap, 0, bufferSize);
if(!pRawInput)
return 0;
GetRawInputData((HRAWINPUT)lParam, RID_INPUT,
pRawInput, &bufferSize, sizeof(RAWINPUTHEADER));
ParseRawInput(pRawInput);
HeapFree(hHeap, 0, pRawInput);
}
return 0;
GetRawInputData converts the handle given by the WM_INPUT message to a RAWINPUT pointer. We then pass this pointer to ParseRawInput which does the bulk of the processing.
The RAWINPUT structure provides us with the device handle, type of input and the input data itself. For mouse and keyboard input, we can use the RAWMOUSE and RAWKEYBOARD structures, but for any other device we have to use the RAWHID structure which just contains the raw input data, as an array of bytes. It is now up to us to interpret this array.
Step 3: Interpret the Device Data
At this point, the first important observation is that this array actually contains the state of our joystick (i.e., my RumblePad). If we press a button or move one of the axes, we get a new WM_INPUT message and an array that reflects the new state of the joystick. That way, we could disassemble the array and determine the bits corresponding to the buttons and bytes corresponding to the axes. But this works only for our special joystick and not for most of the devices out there. So, how do we interpret the data at runtime?
The Raw Input API gives us access to some device information using the GetRawInputDeviceInfo function. Given the handle to the raw input device and the RIDI_PREPARSEDDATA command we can obtain so called "preparsed data". The WDK documentation just says, "The internal structure of a _HIDP_PREPARSED_DATA structure is reserved for internal system use". Here is the code to obtain this data block:
CHECK( GetRawInputDeviceInfo(pRawInput->header.hDevice,
RIDI_PREPARSEDDATA, NULL, &bufferSize) == 0 );
CHECK( pPreparsedData = (PHIDP_PREPARSED_DATA)HeapAlloc(hHeap, 0, bufferSize) );
CHECK( (int)GetRawInputDeviceInfo(pRawInput->header.hDevice,
RIDI_PREPARSEDDATA, pPreparsedData, &bufferSize) >= 0 );
The first call to GetRawInputDeviceInfo just gives us the size of the preparsed data. We use that to allocate a block that fits the data and retrieve it in a second call to GetRawInputDeviceInfo. CHECK is a small macro that I use to handle errors. If the expression in the argument evaluates to FALSE or 0, the macro frees any allocated memory and returns from the function.
Now here is the big picture. The device data we get with every WM_INPUT message is actually a series of HID reports from the HIDClass driver and we can use the preparsed data to unpack HID reports and determine the pressed buttons and axis values. (I guess, this is the way DirectInput has been implemented.)
First, we determine the number of buttons the joystick has. For that, we use the HidP_* functions from hid.dll. Obviously, hid.dll is the user space library used to communicate with the HIDClass driver and the lowest level library Windows offers for that kind of I/O.
CHECK( HidP_GetCaps(pPreparsedData, &Caps) == HIDP_STATUS_SUCCESS )
CHECK( pButtonCaps = (PHIDP_BUTTON_CAPS)HeapAlloc
(hHeap, 0, sizeof(HIDP_BUTTON_CAPS) * Caps.NumberInputButtonCaps) );
capsLength = Caps.NumberInputButtonCaps;
CHECK( HidP_GetButtonCaps(HidP_Input, pButtonCaps,
&capsLength, pPreparsedData) == HIDP_STATUS_SUCCESS )
g_NumberOfButtons = pButtonCaps->Range.UsageMax - pButtonCaps->Range.UsageMin + 1;
HidP_GetCaps gets us the number of the different capabilities we can query, the Usage and Usage Page of the device and the length in bytes of HID reports. To query the number of input buttons, we allocate a buffer that fits multiple HIDP_BUTTON_CAPS structures and call HidP_GetButtonCaps to fill it. The first parameter of HidP_GetButtonCaps specifies the report type. HIDs can have input reports (i.e. for buttons, knobs, faders, touch screens, etc.) and output reports (i.e. for LEDs, displays, force feedback, etc). The next three parameters are the pointer to our allocated buffer, its length and the pointer to the device's preparsed data.
HidP_GetButtonCaps returns the capabilities for every type of HID control of our joystick, that is, its Usage. pButtonCaps[0].UsagePage indicates the usage of the first set of HID controls (see Table 1 of HID Usage Tables). UsageMin and UsageMax indicate the lower and upper bound of usage range, i.e. the range of indicies that is returned by the HIDClass driver for the buttons of the joystick. The number of buttons is then the difference of UsageMin and UsageMax plus one.
The reason why HidP_GetButtonCaps returns an array of HIDP_BUTTON_CAPS structures is that a joystick can assign different usages for different buttons. For example, my RumblePad has a button labeled "Vibration" that enables or disables force feedback effects. The UsagePage member of the first array element indicates Button Page for the twelve action buttons, whereas the second array elements indicates vendor-defined usage for the "Mode" and "Vibration" buttons.
We now get the value capability array. This array specifies the capabilities of HID controls that can have more than two states (i.e. pressed or released). These controls often have a range of values. For example, my RumblePad has two analog sticks, that is, four axes, each of which has a range of 0x00 to 0xFF where 0x80 equals the centered position of the stick.
CHECK( pValueCaps = (PHIDP_VALUE_CAPS)HeapAlloc
(hHeap, 0, sizeof(HIDP_VALUE_CAPS) * Caps.NumberInputValueCaps) );
capsLength = Caps.NumberInputValueCaps;
CHECK( HidP_GetValueCaps(HidP_Input, pValueCaps,
&capsLength, pPreparsedData) == HIDP_STATUS_SUCCESS )
The member UsagePage of the HIDP_VALUE_CAPS structure again indicates the usage of the value (i.e. which axis). PhysicalMin and PhysicalMax indicate the range of the value. Note that these are not used by the sample code provides with this article. The sample code assumes the range to be between 0x00 and 0xFF.
Now we obtain the state of the action buttons from the HID input report in pRawInput->data.hid.bRawData.
usageLength = g_NumberOfButtons;
CHECK(
HidP_GetUsages(
HidP_Input, pButtonCaps->UsagePage, 0, usage,
&usageLength, pPreparsedData,
(PCHAR)pRawInput->data.hid.bRawData, pRawInput->data.hid.dwSizeHid
) == HIDP_STATUS_SUCCESS );
ZeroMemory(bButtonStates, sizeof(bButtonStates));
for(i = 0; i < usageLength; i++)
bButtonStates[usage[i] - pButtonCaps->Range.UsageMin] = TRUE;
HidP_GetUsages returns only those buttons in usage which are actually pressed. I guess that this code snippet is self-explaining.
Finally, we obtain the state of the valued controls from the HID input report.
for(i = 0; i < Caps.NumberInputValueCaps; i++)
{
CHECK(
HidP_GetUsageValue(
HidP_Input, pValueCaps[i].UsagePage, 0,
pValueCaps[i].Range.UsageMin, &value, pPreparsedData,
(PCHAR)pRawInput->data.hid.bRawData, pRawInput->data.hid.dwSizeHid
) == HIDP_STATUS_SUCCESS );
switch(pValueCaps[i].Range.UsageMin)
{
case 0x30: lAxisX = (LONG)value - 128;
break;
case 0x31: lAxisY = (LONG)value - 128;
break;
case 0x32: lAxisZ = (LONG)value - 128;
break;
case 0x35: lAxisRz = (LONG)value - 128;
break;
case 0x39: lHat = value;
break;
}
}
HidP_GetUsageValue works the same way HidP_GetUsages does. It extracts the usage in UsageMin and UsageMax and the current value of the HID control from the HID input report. For my little RumblePad, I have examined only UsageMin to distinguish between the axes.
The rest of the sample code that I did not explain draws the values extracted from the HID input report in an appropriate manner. That's it!
Further Considerations
I showed in this article that it is possible to use the Raw Input API for joystick input with a little help from the HIDClass driver. I suppose that this API is just a layer on top of the HID user mode library and below DirectInput. In fact, it is also possible to bypass the Raw Input API and do all HID communication by using only the HID user library. Just take a look at the HClient sample of the WDK. It does the same things I do to interpret HID input reports without using Raw Input. You can't get any lower-level interface when developing your game input system as the HID user mode library is the only interface that separates your application from kernel mode, although I doubt that using the HID user library directly will gain much speed.
Last but not least, I provide you with a small outline of the things you have to do when using the HID user mode library directly:
- Enumerate the devices of the
HIDClass Device Setup Class using the SetupAPI. - Get the instance path of a specific device via
SetupDiGetDeviceInterfaceDetail. - Open a handle to the device via
CreateFile using the instance path. - Use
ReadFile, WriteFile and the HidP_* functions to communicate with the HID. - Close the handle.
Note that you cannot use this method on mouse or keyboard devices, because Windows uses these devices exclusively (see Top-Level Collections Opened by Windows for System Use).
References
History
- 23rd April, 2011: Initial post

