Useful links
1 Introduction. Why abstract nonsense?
Once one engineer said to me, “I do not need abstract class since I am solving specific problems only” He uses FORTRAN for calculation. Advanced engineers understand usefulness of abstraction. Abstract nonsense in math is next generation of abstraction. In
mathematics, abstract nonsense, general abstract nonsense, and general nonsense are terms used facetiously by some
mathematicians to describe certain kinds of arguments and methods related to
category theory. (Very) roughly speaking, category theory is the study of the general form of mathematical theories, without regard to their content. As a result, a
proof that relies on category theoretic ideas often seems slightly out of context to those who are not used to such abstraction, sometimes to the extent that it resembles a comical
non sequitur. Such proofs are sometimes dubbed “abstract nonsense” as a light-hearted way of alerting people to their abstract nature.
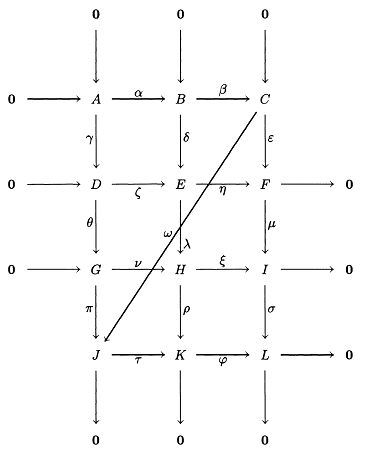
Category theory deals in an abstract way with mathematical structures and relationships between them: it abstracts from sets and functions to objects linked in diagrams by morphisms or arrows. High level of abstraction of Category Theory is explained in
Goldblatt. Topoi: The Categorial Analysis of Logic. This book contains following figure:

We did not actually say what a and f are. The point is that they can be anything you like. a might be a set with f its identity function. But f might be a number, or a pair of numbers, or a banana, or the Eiffel tower, or even Richard Nixon. Likewise for f. Author of this article was very impressed by
the math abstract nonsense and even developed a
Category theory software. Then author introduced
an “abstract nonsense” paradigm in other his software. This paradigm means that all domains contains objects and arrows only. However objects (resp. arrows ) can have different types. Following picture represents diagram with different type objects (resp. arrows).
Moreover object can be multi-typed, i.e. belong to several types. This phenomenon is known as
multiple inheritance, which is
also well known in math long time ago. For example in mathematics, the real line, or real number line is the line whose points are the real numbers. That is, the real line is the set R of all real numbers, viewed as a geometric
space, namely the Euclidean space of dimension one. It can be thought of as a vector space (or affine space), a metric space, a topological space, a measure space, or a linear continuum. Author
find that abstract nonsense is very effective. This article is first in series devoted to abstract nonsense.
2 Background
Applications of objects and arrows are well known. For example following software uses objects and arrows:
However these software products reflects rather status quo of the pre-computer era. At 1974 author studied control theory. He used diagrams like following:
Similar diagrams
uses Simulink. By meaning these diagrams are very similar to
data flow diagrams. At 1974 author learned
analog computers and he find that above block diagrams rather correspond to analogue computer than digital one. Abstract nonsense language is
an extension of dataflow diagrams language. Objects of very different types are used in a single diagram.
Author thinks that abstract nonsense would not be accepted at once since lot of engineers are familiar with above
data flow diagrams. Any innovation would not been accepted at once as well as the category theory
in math. Adoption of innovation takes long time. At 1977 author used FORTRAN for calculation. However a lot of researchers use FORTRAN till now.
But new object oriented languages become more popular than FORTRAN. This article shows
advantages of abstract nonsense in software development.
3 First example. Plane with with rotodome. Outlook
Here we consider a motion of plane with rotodome.
Absolute motion of rotodome is a superposition of
a motion of the plane and a relative motion of the rotodome with respect to the plane. Following picture represents
a simulation of this phenomenon.
This picture contains two type of arrows. Arrow with a
icon is an information link. It links a provider of information with its consumer.
A link with icon is a link of
a reference frame binding. Objects Linear and Rotation are providers of information. They calculate motion parameters. Both Plane and Rotodome are simultaneously consumers of information and reference frames. The M link means that
a motion of Rotodome is
a relative motion with respect to Airplane. Arrow D1 (resp. D2) means that Airplane (resp. Rotodome) is data consumer of Linear (resp. Rotation). So this example contains different types of arrows and multiple inheritance.
4 Basic interfaces
This section contains basic interfaces which are used in any applications of abstract nonsense. Any abstract nonsense object implements ICategoryObject interface.
public interface ICategoryObject : IAssociatedObject
{
ICategory Category
{
get;
}
ICategoryArrow Id
{
get;
}
}
Any abstract nonsense arrow implements an ICategoryArrow interface
public interface ICategoryArrow : IAssociatedObject
{
ICategoryObject Source
{
get;
set;
}
ICategoryObject Target
{
get;
set;
}
bool IsMonomorphism
{
get;
}
bool IsEpimorphism
{
get;
}
bool IsIsomorphism
{
get;
}
ICategoryArrow Compose(ICategory category, ICategoryArrow next);
}
5 Information flow
A information flow domain contains following basic objects:
- Provider of data (
IMeasurements intreface) - Consumer of data (
IDataConsumer intreface) - Elementary unit of data exchange (
IMeasure intreface) - Link of data (
DataLink class which implements ICategoryArrow interface)
The icon corresponds to a DataLink arrow. Source (resp. Target of DataLink is always an IMeasurements (resp. IDataConsumer) object. Following code represents these objects:
public interface IMeasurements
{
int Count
{
get;
}
IMeasure this[int number]
{
get;
}
void UpdateMeasurements();
bool IsUpdated
{
get;
set;
}
}
public interface IDataConsumer
{
void Add(IMeasurements measurements);
void Remove(IMeasurements measurements);
void UpdateChildrenData();
int Count
{
get;
}
IMeasurements this[int number]
{
get;
}
void Reset();
event Action OnChangeInput;
}
public interface IMeasure
{
Func<object> Parameter
{
get;
}
string Name
{
get;
}
object Type
{
get;
}
}
[Serializable()]
public class DataLink : ICategoryArrow, ISerializable,
IRemovableObject, IDataLinkFactory
{
#region Fields
public static readonly string SetProviderBefore =
"You should create measurements source before consumer";
private static Action<DataLink> checker;
private IDataConsumer source;
private IMeasurements target;
private int a = 0;
protected object obj;
private static IDataLinkFactory dataLinkFactory = new DataLink();
#endregion
#region Ctor
public DataLink()
{
}
public DataLink(SerializationInfo info, StreamingContext context)
{
a = (int)info.GetValue("A", typeof(int));
}
#endregion
#region ISerializable Members
public void GetObjectData(SerializationInfo info, StreamingContext context)
{
info.AddValue("A", a);
}
#endregion
#region ICategoryArrow Members
public ICategoryObject Source
{
set
{
if (source != null)
{
throw new Exception();
}
IDataLinkFactory f = this;
source = f.GetConsumer(value);
}
get
{
return source as ICategoryObject;
}
}
public ICategoryObject Target
{
get
{
return target as ICategoryObject;
}
set
{
if (target != null)
{
throw new Exception();
}
IDataLinkFactory f = this;
IMeasurements t = f.GetMeasurements(value);
bool check = true;
IAssociatedObject s = source as IAssociatedObject;
if (s.Object != null & value.Object != null)
{
if (check)
{
INamedComponent ns = s.Object as INamedComponent;
INamedComponent nt = value.Object as INamedComponent;
if (nt != null & ns != null)
{
if (PureDesktopPeer.GetDifference(nt, ns) >= 0)
{
throw new Exception(SetProviderBefore);
}
}
}
target = t;
source.Add(target);
}
if (!check)
{
return;
}
try
{
if (checker != null)
{
checker(this);
}
}
catch (Exception e)
{
e.ShowError(10);
source.Remove(target);
throw e;
}
}
}
public bool IsMonomorphism
{
get
{
return false;
}
}
public bool IsEpimorphism
{
get
{
return false;
}
}
public bool IsIsomorphism
{
get
{
return false;
}
}
public ICategoryArrow Compose(ICategory category, ICategoryArrow next)
{
return null;
}
#endregion
#region IAssociatedObject Members
public object Object
{
get
{
return obj;
}
set
{
obj = value;
}
}
#endregion
#region IRemovableObject Members
public void RemoveObject()
{
if (source == null | target == null)
{
return;
}
source.Remove(target);
}
#endregion
#region IDataLinkFactory Members
IDataConsumer IDataLinkFactory.GetConsumer(ICategoryObject source)
{
IAssociatedObject ao = source;
object o = ao.Object;
if (o is INamedComponent)
{
IDataConsumer dcl = null;
INamedComponent comp = o as INamedComponent;
IDesktop desktop = comp.Root.Desktop;
desktop.ForEach<DataLink>((DataLink dl) =>
{
if (dcl != null)
{
return;
}
object dt = dl.Source;
if (dt is IAssociatedObject)
{
IAssociatedObject aot = dt as IAssociatedObject;
if (aot.Object == o)
{
dcl = dl.source as IDataConsumer;
}
}
});
if (dcl != null)
{
return dcl;
}
}
IDataConsumer dc = DataConsumerWrapper.Create(source);
if (dc == null)
{
CategoryException.ThrowIllegalTargetException();
}
return dc;
}
IMeasurements IDataLinkFactory.GetMeasurements(ICategoryObject target)
{
IAssociatedObject ao = target;
object o = ao.Object;
if (o is INamedComponent)
{
IMeasurements ml = null;
INamedComponent comp = o as INamedComponent;
IDesktop d = null;
INamedComponent r = comp.Root;
if (r != null)
{
d = r.Desktop;
}
else
{
d = comp.Desktop;
}
if (d != null)
{
d.ForEach<DataLink>((DataLink dl) =>
{
if (ml != null)
{
return;
}
object dt = dl.Target;
if (dt is IAssociatedObject)
{
IAssociatedObject aot = dt as IAssociatedObject;
if (aot.Object == o)
{
ml = dl.Target as IMeasurements;
}
}
});
if (ml != null)
{
return ml;
}
}
}
IMeasurements m = MeasurementsWrapper.Create(target);
if (m == null)
{
CategoryException.ThrowIllegalTargetException();
}
return m;
}
#endregion
#region Public Members
public static Action<DataLink> Checker
{
set
{
checker = value;
}
}
public static IDataLinkFactory DataLinkFactory
{
get
{
return dataLinkFactory;
}
set
{
dataLinkFactory = value;
}
}
public IMeasurements Measurements
{
get
{
return target;
}
}
#endregion
}
5 6D Kinematics
A kinematics domain contains following basic types:
- 3D Position (
IPosition interface); - 3D Orientation (
IOrientation interface; - Standard 3D Position (
Position class which implements IPosition interface); - 3D Reference frame (
ReferenceFrame class which implements both IPosition and IOrientation); - Holder 3D Reference frame (
IReferenceFrame interface) ; - Reference frame binding (
ReferenceFrameArrow class which implements ICategoryArrow interface).
Source (resp. target) of ReferenceFrameArrow is always IPosition (resp. IReferenceFrame). This arrow means that coordinates of IPosition
are relative with respect to IReferenceFrame. Following code represents these
types:
public interface IPosition
{
double[] Position
{
get;
}
IReferenceFrame Parent
{
get;
set;
}
object Parameters
{
get;
set;
}
void Update();
}
public interface IOrientation
{
double[] Quaternion
{
get;
}
double[,] Matrix
{
get;
}
}
public class Position : IPosition, IChildrenObject
{
#region Fields
protected IReferenceFrame parent;
protected double[] own = new double[] { 0, 0, 0 };
protected double[] position = new double[3];
protected object parameters;
protected IAssociatedObject[] ch = new IAssociatedObject[1];
#endregion
#region Ctor
protected Position()
{
}
public Position(double[] position)
{
for (int i = 0; i < own.Length; i++)
{
own[i] = position[i];
}
}
#endregion
#region IPosition Members
double[] IPosition.Position
{
get { return position; }
}
public virtual IReferenceFrame Parent
{
get
{
return parent;
}
set
{
parent = value;
}
}
public virtual object Parameters
{
get
{
return parameters;
}
set
{
parameters = value;
if (value is IAssociatedObject)
{
IAssociatedObject ao = value as IAssociatedObject;
ch[0] = ao;
}
}
}
public virtual void Update()
{
Update(BaseFrame);
}
#endregion
#region Specific Members
protected virtual void Update(ReferenceFrame frame)
{
double[,] m = frame.Matrix;
double[] p = frame.Position;
for (int i = 0; i < p.Length; i++)
{
position[i] = p[i];
for (int j = 0; j < own.Length; j++)
{
position[i] += m[i, j] * own[j];
}
}
}
protected virtual ReferenceFrame BaseFrame
{
get
{
if (parent == null)
{
return Motion6D.Motion6DFrame.Base;
}
return parent.Own;
}
}
#endregion
#region IChildrenObject Members
IAssociatedObject[] IChildrenObject.Children
{
get { return ch; }
}
#endregion
}
public class ReferenceFrame : IPosition, IOrientation
{
#region Fields
protected double[] quaternion = new double[] { 1, 0, 0, 0 };
protected double[] position = new double[] { 0, 0, 0 };
protected double[,] matrix = new double[,] { { 1, 0, 0 }, { 0, 1, 0 }, { 0, 0, 1 } };
protected double[,] qq = new double[4, 4];
protected double[] p = new double[3];
protected IReferenceFrame parent;
protected object parameters;
private double[] auxPos = new double[3];
#endregion
#region Ctor
public ReferenceFrame()
{
}
private ReferenceFrame(bool b)
{
}
#endregion
#region IPosition Members
public double[] Position
{
get { return position; }
}
public virtual IReferenceFrame Parent
{
get
{
return parent;
}
set
{
parent = value;
}
}
public virtual object Parameters
{
get
{
return parameters;
}
set
{
parameters = value;
}
}
static public ReferenceFrame GetFrame(IPosition position)
{
if (position is IReferenceFrame)
{
IReferenceFrame f = position as IReferenceFrame;
return f.Own;
}
return GetParentFrame(position);
}
static public ReferenceFrame GetParentFrame(IPosition position)
{
if (position.Parent == null)
{
return Motion6DFrame.Base;
}
return position.Parent.Own;
}
static public void GetRelativeFrame(ReferenceFrame baseFrame,
ReferenceFrame targetFrame, ReferenceFrame relative)
{
double[] bp = baseFrame.Position;
double[] tp = targetFrame.Position;
double[,] bm = baseFrame.Matrix;
double[] rp = relative.Position;
for (int i = 0; i < 3; i++)
{
rp[i] = 0;
for (int j = 0; j < 3; j++)
{
rp[i] += bm[j, i] * (tp[i] - bp[i]);
}
}
double[,] tm = targetFrame.Matrix;
double[,] rm = relative.Matrix;
for (int i = 0; i < 3; i++)
{
for (int j = 0; j < 3; j++)
{
rm[i, j] = 0;
for (int k = 0; k < 3; k++)
{
rm[i, j] += bm[k, i] * tm[k, j];
}
}
}
}
static public ReferenceFrame GetOwnFrame(IPosition position)
{
if (position is IReferenceFrame)
{
IReferenceFrame f = position as IReferenceFrame;
return f.Own;
}
return GetParentFrame(position);
}
public virtual void Update()
{
ReferenceFrame p = ParentFrame;
position = p.Position;
quaternion = p.quaternion;
matrix = p.matrix;
}
#endregion
#region IOrientation Members
public double[] Quaternion
{
get { return quaternion; }
}
public double[,] Matrix
{
get { return matrix; }
}
#endregion
#region Specific Members
public void GetRelativePosition(double[] inPosition, double[] outPosition)
{
for (int i = 0; i < 3; i++)
{
auxPos[i] = inPosition[i] - position[i];
}
for (int i = 0; i < 3; i++)
{
outPosition[i] = 0;
for (int j = 0; j < 3; j++)
{
outPosition[i] += matrix[j, i] * auxPos[j];
}
}
}
static public void GetRelative(ReferenceFrame baseFrame, ReferenceFrame relativeFrame,
ReferenceFrame result, double[] diff)
{
V3DOperations.QuaternionInvertMultiply(relativeFrame.quaternion,
baseFrame.quaternion, result.quaternion);
result.SetMatrix();
for (int i = 0; i < 3; i++)
{
diff[i] = relativeFrame.position[i] - baseFrame.position[i];
}
double[,] m = baseFrame.Matrix;
double[] p = result.position;
for (int i = 0; i < 3; i++)
{
p[i] = 0;
for (int j = 0; j < 3; j++)
{
p[i] += m[j, i] * diff[j];
}
}
}
static public void GetRelative(ReferenceFrame baseFrame, ReferenceFrame relativeFrame,
ReferenceFrame result, double[] diff, double[,] matrix4)
{
GetRelative(baseFrame, relativeFrame, result, diff);
double[,] m = result.Matrix;
for (int i = 0; i < 3; i++)
{
for (int j = 0; j < 3; j++)
{
matrix4[i, j] = m[i, j];
}
}
double[] p = result.position;
for (int i = 0; i < 3; i++)
{
matrix4[3, i] = p[i];
matrix4[i, 3] = 0;
}
matrix4[3, 3] = 1;
}
static public void GetRelative(ReferenceFrame baseFrame, ReferenceFrame relativeFrame,
ReferenceFrame result, double[] diff, double[,] matrix4, double[] array16)
{
GetRelative(baseFrame, relativeFrame, result, diff, matrix4);
for (int i = 0; i < 4; i++)
{
int k = 4 * i;
for (int j = 0; j < 4; j++)
{
array16[k + j] = matrix4[i, j];
}
}
}
static public double[,] CalucateViewMatrix(double[] position, double rotation)
{
double[] r = position;
double ap = 0;
ap = r[0] * r[0] + r[2] * r[2];
double a = ap + r[1] * r[1];
ap = Math.Sqrt(ap);
a = Math.Sqrt(a);
double[] ez = { r[0] / a, r[1] / a, r[2] / a };
double[] ex1 = null;
if (ap < 0.00000000001)
{
ex1 = new double[] { 1.0, 0.0, 0.0 };
}
else
{
ex1 = new double[] { -r[2] / ap, 0, r[0] / ap };
}
double[] ey1 = {ez[1] * ex1[2] - ez[2] * ex1[1],
ez[2] * ex1[0] - ez[0] * ex1[2],
ez[0] * ex1[1] - ez[1] * ex1[0]};
double[] ey = new double[3];
double[] ex = new double[3];
double alpha = rotation;
alpha *= Math.PI / 180.0;
alpha += Math.PI;
double s = 0;
double c = 1;
double sD2 = Math.Sin(alpha / 2);
double cD2 = Math.Cos(alpha / 2);
double[] rc = { r[0], r[1] };
r[0] = rc[0] * c - rc[1] * s;
r[1] = rc[1] * s + rc[1] * c;
ex = ex1;
ey = ey1;
double[][] m = { ex, ey, ez };
double[] rr = { r[1], r[2], r[0] };
double[,] mat = new double[4, 4];
for (int i = 0; i < 3; i++)
{
mat[3, i] = r[i];
for (int j = 0; j < 3; j++)
{
mat[j, i] = m[j][i];
}
}
double[][] temp = new double[3][];
temp[0] = new double[] { c, s, 0 };
temp[1] = new double[] { -s, c, 0 };
temp[2] = new double[] { 0, 0, 1 };
double[,] mh = new double[3, 3];
for (int i = 0; i < 3; i++)
{
for (int j = 0; j < 3; j++)
{
mh[i, j] = 0;
for (int k = 0; k < 3; k++)
{
for (int l = 0; l < 3; l++)
{
mh[i, j] += mat[i, k] * temp[k][l] * mat[j, l];
}
}
}
}
double[,] mh1 = new double[3, 3];
for (int i = 0; i < 3; i++)
{
for (int j = 0; j < 3; j++)
{
mh1[i, j] = mat[i, j];
}
}
for (int i = 0; i < 3; i++)
{
for (int j = 0; j < 3; j++)
{
mat[i, j] = 0;
for (int k = 0; k < 3; k++)
{
mat[i, j] += mh[i, k] * mh1[k, j];
}
}
}
for (int i = 0; i < 3; i++)
{
rr[i] = 0;
for (int j = 0; j < 3; j++)
{
rr[i] += mat[i, j] * mat[3, j];
}
}
double[,] matr = new double[3, 3];
double[] rp = new double[3];
for (int i = 0; i < 3; i++)
{
rp[i] = mat[3, i];
for (int j = 0; j < 3; j++)
{
matr[i, j] = mat[j, i];
}
}
double[,] qq = new double[4, 4];
double[] e = Vector3D.V3DOperations.VectorNorm(rp);
double[] q = new double[] { cD2, e[0] * sD2, e[1] * sD2, e[2] * sD2 };
double[,] mq = new double[3, 3];
Vector3D.V3DOperations.QuaternionToMatrix(q, mq, qq);
double[,] mr = new double[3, 3];
for (int i = 0; i < 3; i++)
{
for (int j = 0; j < 3; j++)
{
mr[i, j] = 0;
for (int k = 0; k < 3; k++)
{
mr[i, j] += mq[i, k] * matr[k, j];
}
}
}
return mr;
}
public void CalculateRotatedPosition(double[] abs, double[] rot)
{
for (int i = 0; i < 3; i++)
{
rot[i] = 0;
for (int j = 0; j < 3; j++)
{
rot[i] += matrix[j, i] * abs[j];
}
}
}
public virtual void Set(ReferenceFrame baseFrame, ReferenceFrame relative)
{
for (int i = 0; i < 3; i++)
{
position[i] = baseFrame.position[i];
for (int j = 0; j < 3; j++)
{
position[i] += baseFrame.matrix[i, j] * relative.position[j];
}
}
V3DOperations.QuaternionMultiply(baseFrame.quaternion, relative.quaternion, quaternion);
Norm();
SetMatrix();
}
public void SetMatrix()
{
V3DOperations.QuaternionToMatrix(quaternion, matrix, qq);
}
public void Norm()
{
double a = 0;
foreach (double x in quaternion)
{
a += x * x;
}
a = 1 / Math.Sqrt(a);
for (int i = 0; i < 3; i++)
{
quaternion[i] *= a;
}
}
public void GetPositon(IPosition position, double[] coordinates)
{
double[] p1 = this.position;
double[] p2 = position.Position;
for (int i = 0; i < 3; i++)
{
p[i] = p2[i] - p1[i];
}
for (int i = 0; i < 3; i++)
{
coordinates[i] = 0;
for (int j = 0; j < 3; j++)
{
coordinates[i] += matrix[i, j] * p[j];
}
}
}
protected virtual ReferenceFrame ParentFrame
{
get
{
if (parent == null)
{
return Motion6D.Motion6DFrame.Base;
}
return parent.Own;
}
}
#endregion
}
public interface IReferenceFrame : IPosition
{
ReferenceFrame Own
{
get;
}
List<IPosition> Children
{
get;
}
}
[Serializable()]
public class ReferenceFrameArrow : CategoryArrow, ISerializable, IRemovableObject
{
#region Fields
IPosition source;
IReferenceFrame target;
#endregion
#region Constructors
public ReferenceFrameArrow()
{
}
protected ReferenceFrameArrow(SerializationInfo info, StreamingContext context)
{
}
#endregion
#region ISerializable Members
void ISerializable.GetObjectData(SerializationInfo info, StreamingContext context)
{
}
#endregion
#region ICategoryArrow Members
public override ICategoryObject Source
{
get
{
return source as ICategoryObject;
}
set
{
IPosition position = value.GetSource<IPosition>();
if (position.Parent != null)
{
throw new CategoryException("Root", this);
}
source = position;
}
}
public override ICategoryObject Target
{
get
{
return target as ICategoryObject;
}
set
{
IReferenceFrame rf = value.GetTarget<IReferenceFrame>();
IAssociatedObject sa = source as IAssociatedObject;
IAssociatedObject ta = value as IAssociatedObject;
INamedComponent ns = sa.Object as INamedComponent;
INamedComponent nt = ta.Object as INamedComponent;
target = rf;
source.Parent = target;
target.Children.Add(source);
}
}
#endregion
#region IRemovableObject Members
void IRemovableObject.RemoveObject()
{
source.Parent = null;
if (target != null)
{
target.Children.Remove(source);
}
}
#endregion
#region Specific Members
static public List<IPosition> Prepare(IComponentCollection collection)
{
List<IPosition> frames = new List<IPosition>();
if (collection == null)
{
return frames;
}
IEnumerable<object> c = collection.AllComponents;
foreach (object o in c)
{
if (!(o is IObjectLabel))
{
continue;
}
IObjectLabel lab = o as IObjectLabel;
ICategoryObject co = lab.Object;
if (!(co is IReferenceFrame))
{
if (co is IPosition)
{
IPosition p = co as IPosition;
if (p.Parent == null)
{
frames.Add(p);
}
}
continue;
}
IReferenceFrame f = co as IReferenceFrame;
if (f.Parent != null)
{
continue;
}
prepare(f, frames);
}
return frames;
}
private static void prepare(IReferenceFrame frame, List<IPosition> frames)
{
List<IPosition> children = frame.Children;
frames.Add(frame);
foreach (IPosition p in children)
{
if (frames.Contains(p))
{
continue;
}
if (p is IReferenceFrame)
{
IReferenceFrame f = p as IReferenceFrame;
prepare(f, frames);
}
else
{
frames.Add(p);
}
}
}
#endregion
}
Let us consider a following picture:
Type of the Point is Position and the Frame implements IReferenceFrame interface. The Link arrow means that motion of Point is relative with respect to Frame. Absolute coordinates of Point are calculated by following way:
Xa = XF + A11Xr + A12Yr + A13Zr;
Ya = YF + A21Xr + A22Yr + A23Zr;
Za = ZF + A31Xr + A32Yr + A33Zr.
where
- Xa, Ya, Za absolute coordinates of Point
- XF, YF, ZF absolute coordinates of Frame
- Xr, Yr, Zr relative coordinates of Point
- A11,..., A33 - elements of
3D rotation matrix.
7 Plane with with rotodome in details
Let us consider plane and rotodome once again.
Both Plane and Rotodome are objects of ReferenceFrameData type.
[Serializable()]
public class ReferenceFrameData : IReferenceFrame, IDataConsumer
Thus ReferenceFrameData class is simultaneously consumer of information and reference frames since it implements both
a IDataConsumer and a IReferenceFrame. The Linear object calculates
linear motion parameters of Airplane.
X = at + b;
Y = 0;
Z = 0;
Q0 = 1;
Q1 = 0;
Q2 = 0;
Q3 = 0.
Where
Properties of Linear are presented below.
The Linear object supplies necessary formulae of linear motion. Properties of airplane are presented below:
These properties reflect relation between motion parameters of Airplane and output parameters of Linear
| N | Motion parameter of Airplane | Parameter of Linear | Formula |
| 1 | X - coordinate | Formula_1 | at + b |
| 2 | Y - coordinate | Formula_2 | 0 |
| 3 | Z - coordinate | Formula_2 | 0 |
| 4 | Q0 - 0th component of orientation quaternion | Formula_3 | 1 |
| 5 | Q1 - 1st component of orientation quaternion | Formula_2 | 0 |
| 6 | Q2 - 2nd component of orientation quaternion | Formula_2 | 0 |
| 7 | Q3 - 3d component of orientation quaternion | Formula_2 | 0 |
Rotodome is relatively rotated with respect to Airplane. Formulae of relative motion are presented below.
X = 0;
Y = 0;
Z = 0;
Q0 = cos(ct + d);
Q1=0;
Q2 = sin(ct + d);
Q3=0.
Where c and d are constants. Above formulae mean uniform rotation around Y - axis.
Relation between the Rotodome and the Rotation is similar to relation between
the Aircraft and the Linear.
8 Parameters of relative motion
Let us consider the following picture:
Both Point 1 and Point 2 are objects of Position type. The Relative is object
of RelativeMeasurements type:
[Serializable()]
public class RelativeMeasurements : CategoryObject, ISerializable, IMeasurements, IPostSetArrow
{
private IPosition source;
private IPosition target;
private IOrientation oSource;
private IOrientation oTarget;
private Action UpdateAll;
...
This class implements IMeasurements interface. So this object is a provider of data. In above case this class provides Distance between Point 1
and Point 2 which is calculated by following way:
.
The Chart object contains chart of distance.
The RelativeMeasurements class contains following field:
private Action UpdateAll;
In above case UpdateAll = UpdateCoinDistance where UpdateCoinDistance calculates relative distance:
void UpdateCoinDistance()
{
double[] y = source.Position;
double[] x = target.Position;
double a = 0;
for (int i = 0; i < 3; i++)
{
double z = y[i] - x[i];
relativePos[i] = z;
a += z * z;
}
distance = Math.Sqrt(a);
}
object GetDistance()
{
return distance;
}
...
IMeasure measure = new Measure(GetDistance, "Distance");
In this code source (resp. target) is source (resp target) object which implements IPosition interface
Following picture contains Point (Position type) and Frame (ReferenceFrame type). So Point implements IPosition interface. The Frame implements both IPosition and IOrientation.
In this case the Relative object provides following parameters.
| N | Name | Meaning |
| 1 | Xr | X - relative coordinate |
| 2 | Yr | Y - relative coordinate |
| 3 | Zr | Z - relative coordinate |
| 4 | Distance | Relative distance |
These parameters are defined by following way:
Xr=A11(XP-XF)+A12(YP-YF)+A13(ZP-ZF);
Yr=A21(XP-XF)+A22(YP-YF)+A23(ZP-ZF);
Zr=A31(XP-XF)+A32(YP-YF)+A33(ZP-ZF);
.
where
- XP, YP, ZP - absolute coordinates of Point;
- XF, YF, ZF - absolute coordinates of Frame;
- A11,..., A33 - elements of
3D rotation matrix of Frame.
Following picture explains meaning of relative motion parameters:
In this case we have relative coordinates besides distance. It requires additional calculation UpdateAll = UpdateCoinDistance + UpdateRelativeCoordinates. Following code contains implementation of the additional calculation:
...
UpdateAll = UpdateCoinDistance;
if (source is IOrientation)
{
oSource = source as IOrientation;
UpdateAll += UpdateRelativeCoordinates;
}
...
void UpdateRelativeCoordinates()
{
double[] sourcePosition = source.Position;
double[] targetPosition = target.Position;
double[] aux = new double[3];
for (int i = 0; i < 3; i++)
{
aux[i] = targetPosition[i] - sourcePosition[i];
}
double[,] sourceOrientation = oSource.Matrix;
for (int i = 0; i < 3; i++)
{
relativePosition[i] = 0;
for (int j = 0; j < 3; j++)
{
relativePosition[i] += sourceOrientation[i, j] * aux[j];
}
}
}
object GetX()
{
return relativePosition[0];
}
object GetY()
{
return relativePosition[1];
}
object GetZ()
{
return relativePosition[2];
}
...
IMeasure[] relative = new IMeasure[3];
Func<object>[] coord = new Func<object>[] { GetX, GetY, GetZ };
string[] names = new string[] { "x", "y", "z" };
for (int i = 0; i < 3; i++)
{
relative[i] = new Measure(coord[i], names[i]);
}
Following picture contains two reference frames:
Both frames are objects of (ReferenceFrame type). Now the Relative object provides following parameters.
| N | Name | Meaning |
| 1 | Xr | X - relative coordinate |
| 2 | Yr | Y - relative coordinate |
| 3 | Zr | Z - relative coordinate |
| 4 | Distance | Relative distance |
| 5 | Q0 | 0th component of relative orientation quaternion |
| 6 | Q1 | 1st component of relative orientation quaternion |
| 7 | Q2 | 2nd component of relative orientation quaternion |
| 8 | Q3 | 3d component of relative orientation quaternion |
Following picture explains this phenomenon.
This article explains application of quaternions to 6D motion kinematics. Relative orientation quaternion can be defined by following way:
Qr=Q2-1Q1
where
- Q1 - quaternion of Frame 1;
- Q2 - quaternion of Frame 2.
Both Frame 1 and Frame 2 implement both IPosition and IOrientation.
In this case we have new parameters. It requires additional calculation UpdateAll = UpdateCoinDistance + UpdateRelativeCoordinates + UpdateRelativeQuaternion.
The following code contains an implementation of the additional calculation:
...
UpdateAll = UpdateCoinDistance;
if (source is IOrientation)
{
oSource = source as IOrientation;
UpdateAll += UpdateRelativeCoordinates;
}
if (target is IOrientation)
{
oTarget = target as IOrientation;
}
if ((oSource != null) & (oTarget != null))
{
UpdateAll += UpdateRelativeQuaternion;
}
...
void UpdateRelativeQuaternion()
{
Vector3D.V3DOperations.QuaternionInvertMultiply(oSource.Quaternion, oTarget.Quaternion, quaternion);
}
object GetQ0()
{
return quaternion[0];
}
object GetQ1()
{
return quaternion[1];
}
object GetQ2()
{
return quaternion[2];
}
object GetQ3()
{
return quaternion[3];
}
...
IMeasure[] relativeQuaternion = new IMeasure[4];
Func<object>[] quat = new Func<object>[] { GetQ0, GetQ2, GetQ2, GetQ3 };
string[] names = new string[] { "Q0", "Q1", "Q2", "Q3" };
for (int i = 0; i < 4; i++)
{
relativeQuaternion[i] = new Measure(quat[i], names[i]);
}
...
9 Differentiation
A lot of engineering problems require
differentiation of parameters. Differentiation is supplied by following interface:
public interface IDerivation
{
IMeasure Derivation
{
get;
}
}
Let us consider application of this interface. Suppose that we have following function and its derivation
f(t)=t2;
d/dt f(t)=2t.
Following code implements this sample:
public class SquareTime : IMeasure, IDerivation
{
#region Fields
double t;
const double type = (double)0;
SquareTimeDerivation derivation;
#endregion
#region Ctor
public SquareTime()
{
derivation = new SquareTimeDerivation(this);
}
#endregion
#region Public Members
public double Time
{
get
{
return t;
}
set
{
t = value;
}
}
#endregion
#region Private Members
object GetSquareTime()
{
return t * t;
}
#endregion
#region IMeasure Members
Func<object> IMeasure.Parameter
{
get { return GetSquareTime; }
}
string IMeasure.Name
{
get { return "SquareOfTime"; }
}
object IMeasure.Type
{
get { return type; }
}
#endregion
#region IDerivation Members
IMeasure IDerivation.Derivation
{
get { return derivation; }
}
#endregion
#region Derivation
class SquareTimeDerivation : IMeasure
{
#region Fields
SquareTime squareTime;
#endregion
#region Ctor
internal SquareTimeDerivation(SquareTime squareTime)
{
this.squareTime = squareTime;
}
#endregion
#region Private Members
object GetSquareTimeDerivation()
{
return 2 * squareTime.t;
}
#endregion
#region IMeasure Members
Func<object> IMeasure.Parameter
{
get { return GetSquareTimeDerivation; }
}
string IMeasure.Name
{
get { return "SquareOfTimeDerivation"; }
}
object IMeasure.Type
{
get { return SquareTime.type; }
}
#endregion
}
#endregion
}
This sample is too specific. Differentiation of specific functions is not a good idea. Next sections contains alternative methods of differentiation. Following code snippet shows calculation of a
derivative order and
higher derivatives:
public static int GetDerivativeOrder(this IMeasure measure)
{
if (measure is IDerivation)
{
IDerivation d = measure as IDerivation;
IMeasure m = d.Derivation;
return GetDerivativeOrder(m) + 1;
}
return 0;
}
public static IMeasure GetHigherDerivative(this IMeasure measure, int order)
{
if (order == 0)
{
return measure;
}
if (measure is IDerivation)
{
IDerivation d = measure as IDerivation;
IMeasure m = d.Derivation;
return GetHigherDerivative(m, order - 1);
}
return null;
}
Following three subsections explain calculation of derivations.
9.1 Symbolic Differentiation
This link contains theory of symbolic differentiation. If a calculation is represented as expression tree
then derivation can be defined recursively by
chain rule. Above tree contains binary operations "+", "-", "*".
Following interface supplies derivation calculation:
public interface IDerivationOperation
{
ObjectFormulaTree Derivation(ObjectFormulaTree tree, string variableName);
}
Following code implements recursive (chain rule) calculation of derivation:
static public ObjectFormulaTree Derivation(this ObjectFormulaTree tree, string variableName)
{
if (tree.Operation is IDerivationOperation)
{
IDerivationOperation op = tree.Operation as IDerivationOperation;
return op.Derivation(tree, variableName);
}
return null;
}
Besides binary operations "+", "-", "*", "/" there are
nullary, unary, ternary and other operations.
There are two most important types of nullary operations:
Any derivation of constant is equal to zero. Every constant corresponds to element of following type:
public class ElementaryRealConstant : IObjectOperation, IDerivationOperation
{
#region Fields
private const Double a = 0;
private double val;
public static readonly ObjectFormulaTree RealZero = NullTree;
private bool isZero = false;
#endregion
#region Ctor
public ElementaryRealConstant(double val)
{
this.val = val;
}
#endregion
#region IDerivationOperation Members
ObjectFormulaTree IDerivationOperation.Derivation(ObjectFormulaTree tree, string variableName)
{
return RealZero;
}
#endregion
public object this[object[] x]
{
get
{
return val;
}
}
public object ReturnType
{
get
{
return a;
}
}
static private ObjectFormulaTree NullTree
{
get
{
ElementaryRealConstant op = new ElementaryRealConstant(0);
op.isZero = true;
return new ObjectFormulaTree(op, new List<ObjectFormulaTree>());
}
}
}
Partial derivations of variables can be 1 or 0 as it is shown below:
Following class reflects this circumstance:
public class VariableDouble : Variable, IDerivationOperation
{
#region Ctor
public VariableDouble(string variableName)
: base((double)0, variableName)
{
}
#endregion
#region IDerivationOperation Members
ObjectFormulaTree IDerivationOperation.Derivation(ObjectFormulaTree tree, string variableName)
{
if (variableName.Equals("d/d" + this.variableName))
{
return new ObjectFormulaTree(new Unity(), new List<ObjectFormulaTree>());
}
return new ObjectFormulaTree(new Zero(), new List<ObjectFormulaTree>());
}
#endregion
#region Helper classes
class Unity : IObjectOperation, IDerivationOperation
{
const Double a = 0;
const Double b = 1;
object[] inputs = new object[0];
static ObjectFormulaTree tree;
internal Unity()
{
}
object[] IObjectOperation.InputTypes
{
get { return inputs; }
}
public virtual object this[object[] x]
{
get { return b; }
}
object IObjectOperation.ReturnType
{
get { return a; }
}
static Unity()
{
tree = new ObjectFormulaTree(new Zero(), new List<ObjectFormulaTree>());
}
ObjectFormulaTree IDerivationOperation.Derivation(ObjectFormulaTree tree, string s)
{
return tree;
}
}
class Zero : Unity
{
const Double c = 0;
public override object this[object[] x]
{
get
{
return c;
}
}
}
#endregion
}
Unary operations are elementary functions sine, cosine etc. It is the table of derivations of these functions
which is used for derivations of unary functions. Derivations of addition and multiplication are calculated by following way:
Following code calculates partial derivative of addition, substraction and multiplication
ObjectFormulaTree IDerivationOperation.Derivation(ObjectFormulaTree tree, string variableName)
{
bool[] b = new bool[] { false, false };
if ((symbol == '+') | (symbol == '-'))
{
IObjectOperation op = new ElementaryBinaryOperation(symbol,
new object[] { tree[0].ReturnType, tree[1].ReturnType });
List<objectformulatree> l = new List<objectformulatree>();
for (int i = 0; i < tree.Count; i++)
{
ObjectFormulaTree t = tree[i].Derivation(variableName);
b[i] = ZeroPerformer.IsZero(t);
l.Add(t);
}
if (b[0])
{
if (b[1])
{
return ElementaryRealConstant.RealZero;
}
if (symbol == '+')
{
return l[1];
}
List<objectformulatree> ll = new List<objectformulatree>();
ll.Add(l[1]);
return new ObjectFormulaTree(new ElementaryFunctionOperation('-'), ll);
}
if (b[1])
{
return l[0];
}
return new ObjectFormulaTree(op, l);
}
ObjectFormulaTree[] der = new ObjectFormulaTree[2];
for (int i = 0; i < 2; i++)
{
der[i] = tree[i].Derivation(variableName);
b[i] = ZeroPerformer.IsZero(der[i]);
}
if (symbol == '*')
{
List<objectformulatree> list = new List<objectformulatree>();
for (int i = 0; i < 2; i++)
{
List<objectformulatree> l = new List<objectformulatree>();
l.Add(tree[i]);
l.Add(der[1 - i]);
ElementaryBinaryOperation o = new ElementaryBinaryOperation('*',
new object[] { l[0].ReturnType, l[1].ReturnType });
list.Add(new ObjectFormulaTree(o, l));
}
if (b[0] & b[1])
{
return ElementaryRealConstant.RealZero;
}
for (int i = 0; i < b.Length; i++)
{
if (b[i])
{
return list[i];
}
}
ElementaryBinaryOperation op = new ElementaryBinaryOperation('+',
new object[] { list[0].ReturnType, list[1].ReturnType });
return new ObjectFormulaTree(op, list);
}
return null;
}
Let us consider following example:
The Expression object contains function f(t) = t3, and Transformation object just transfers it without any change:
Now we would like to differentiate Expression formula. We set value of Derivation order to 1.
.
In result symbolic differentiation of f(t) = t3 is performed. The differentiation is used by the Transformation object.
In result the Transformation object has both x(t), and d/dt x(t) where x(t)=t3. Following picture contains charts of both x(t), and d/dt x(t).
9.2 Ordinary differential equations
Motion of mechanical objects usually requires
ordinary differential equations
(abbreviated ODE) . Following component provides solution of ODE. Following
sample contains solution of ODE:
This example solves following ODE:
Properties of the ODE component are presented below:
In case of ODE d/dt is just right part of equations, i.e.
d/dt x = -ax + by;
d/dt y = -ay - bx.
9.3 Transfer functions
Transfer function is indeed a form of ODE. Following picture presents Transfer function component:
A red (resp. blue) curve represents the output of Transfer function. Properties of Transfer function are presented below:
Transfer functions are indeed ODE therefore they provide derivations by evident way.
10 Differentiation and 6D motion
10.1 Basic classes and interfaces
Derivations of 6D motion parameters have very important role in the engineering.
For example a lot of problems concerns with
velocity and
angular velocity. If coordinates are
differentiable functions
of time, then we can define velocity. Similarly if components of quaternion are
differentiable functions then we can define angular velocity. Following
interfaces are implemented by objects such that velocity (resp. angular
velocity) is defined:
public interface IVelocity
{
double[] Velocity
{
get;
}
}
public interface IAngularVelocity
{
double[] Omega
{
get;
}
}
Following two interfaces are implemented by objects with second derivations of 6D
motion parameters:
public interface IAcceleration
{
double[] LinearAcceleration
{
get;
}
double[] RelativeAcceleration
{
get;
}
}
public interface IAngularAcceleration
{
double[] AngularAcceleration
{
get;
}
}
These objects support
acceleration and
angular acceleration respectively. Following diagram represents classes which implement these interfaces:
10.2 How it works
Let us consider following situation with reference frame. The Frame is object of ReferenceFrameData.
Following table contains mapping between motion parameters of Frame and outputs of Linear and Angular:
| N | Motion parameter | Information provider | Name of output parameter |
| 1 | X | Linear | Formula_1 |
| 2 | Y | Linear | Formula_2 |
| 3 | Z | Linear | Formula_3 |
| 4 | Q0 | Angular | Formula_1 |
| 5 | Q1 | Angular | Formula_2 |
| 6 | Q2 | Angular | Formula_3 |
| 7 | Q3 | Angular | Formula_3 |
Properties of Linear and Angular are presented below:
The Frame object implements following interface:
public interface IReferenceFrame : IPosition
{
ReferenceFrame Own
{
get;
}
List<IPosition> Children
{
get;
}
}
The Own is an object of type ReferenceFrame or its subtype. If all coordinates of Frame are differentiable then Own should implement IVelocity interface. If orientation parameters are not differentiable then Own should not implement IAngularVelocity. So according to the class diagram of 6D motion objects Frame is object of MovedFrame type
According to Section 9.1 motion parameters can be differentiable if we set to 1 Derivation order of Linear (resp. Angular)
Following table represents choice of Own property.
| N | Derivation order of Linear | Derivation order of Angular | Type of Own | Implements IVelocity | Implements IAngularVelocity |
| 1 | 0 | 0 | ReferenceFrame | No | No |
| 2 | 1 | 0 | MovedFrame | Yes | No |
| 3 | 0 | 1 | RotatedFrame | No | Yes |
| 4 | 1 | 1 | Motion6DFrame | Yes | Yes |
Following code contains detection of velocity and angular velocity support:
protected override bool IsVelocity
{
get
{
if (!base.IsVelocity)
{
return false;
}
for (int i = 0; i < 3; i++)
{
if (measurements[i].GetDerivativeOrder() < 1)
{
return false;
}
}
return true;
}
}
protected override bool IsAngularVelocity
{
get
{
if (!base.IsAngularVelocity)
{
return false;
}
for (int i = 3; i < 7; i++)
{
if (measurements[i].GetDerivativeOrder() < 1)
{
return false;
}
}
return true;
}
}
Type of Own property is defined by following way:
bool velocity = IsVelocity;
bool angularVelocty = IsAngularVelocity;
if (velocity & angularVelocty)
{
relative = new Motion6DFrame();
owp = new Motion6DFrame();
}
else if (angularVelocty)
{
relative = new RotatedFrame();
owp = new RotatedFrame();
}
else if (velocity)
{
relative = new MovedFrame();
owp = new MovedFrame();
}
else
{
relative = new ReferenceFrame();
owp = new ReferenceFrame();
}
11. Superposition of 6D motions
The "Plane and rotodome" sample shows 6D motion superposition. However superposition can be recursive as it is presented below:
The Frame 2 is moved with respect to Frame 1. Otherwise Frame 3 is moved with respect to Frame 2.
11.1 Motion of Helicopter
Good example of relative motion is motion of helicopter. Rotor of helicopter is moved with respect to fuselage,
Otherwise main rotor blades cyclically moved throughout rotation. Following picture represents rotor assembly:
Following movie shows motion of helicopter blades:
Following picture represents a helicopter motion model:
Objects with contain necessary kinematics formulae. The Fuselage position is a fixed reference frame of the fuselage. This frame can be installed on a moving frame. Objects with are moving frames. The Tail rotor motion is rotating frame which is installed on the Fuselage position. This frame is the reference frame of the tail rotor. The Base of MR is installed on the Fuselage position. It is the frame of the main rotor of the helicopter. The BL 1, ..., BL 5 are positions of blades:
All these frames are installed on the Base of MR and do not take to account a blade pitch. Blades PL 1, ..., PL 5 are installed on BL 1, ..., BL 5. Blades PL 1, ..., PL 5 are responsible for a blade's pitch.
11.2 Variable-Sweep Wing
Another sample is
variable-sweep wing:
A plane is moved with respect a fuselage and a high-lift device is moved with respect the plane. Suppose that Frame 2 is moved with respect to Frame 1 and parameters of relative motion are differentiable. Should Frame 2 support velocity calculation? The answer is: it depends on the Frame 1. If the Frame 1 does not support velocity calculation then the Frame 2 also does not support it. Following table contains dependence of a velocity calculation support.
| N | Frame 1 supports velocity calculation | Frame 1 supports angular velocity calculation | Relative linear parameters are differentiable | Relative angular parameters are differentiable | Frame 2 supports velocity calculation | Frame 2 supports angular velocity calculation |
| 1 | No | No | No | No | No | No |
| 2 | Yes | No | No | No | No | No |
| 3 | No | Yes | No | No | No | No |
| 4 | Yes | Yes | No | No | No | No |
| 5 | No | No | Yes | No | No | No |
| 6 | Yes | No | Yes | No | No | No |
| 7 | No | Yes | Yes | No | No | No |
| 8 | Yes | Yes | Yes | No | Yes | No |
| 9 | No | No | No | Yes | No | No |
| 10 | Yes | No | No | Yes | No | No |
| 11 | No | Yes | No | Yes | No | Yes |
| 12 | Yes | Yes | No | Yes | No | Yes |
| 13 | No | No | Yes | Yes | No | No |
| 14 | Yes | No | Yes | Yes | No | No |
| 15 | No | Yes | Yes | Yes | No | Yes |
| 16 | Yes | Yes | Yes | Yes | Yes | Yes |
Following code contains detection of velocity calculation support:
...
protected virtual bool IsVelocity
{
get
{
if (parent == null)
{
return true;
}
return parent.Own is IVelocity;
}
}
...
protected override bool IsVelocity
{
get
{
if (!base.IsVelocity)
{
return false;
}
for (int i = 0; i < 3; i++)
{
if (measurements[i].GetDerivativeOrder() < 1)
{
return false;
}
}
return true;
}
}
Velocity and angular velocity of the Frame 2 can be calculated by following way.
where:
- - angular velocities of Frame 1, Frame 2 and relative angular velocity;
- A1, A2 - orientation matrixes of Frame 1 and Frame 2;
- V1, V2 - velocities of Frame 1 and Frame 2;
- rr - relative position vector of Frame 2 with respect to Frame 1;
- Vr - relative velocity vector of Frame 2 with respect to Frame 1;
12 Relative measurements
Following picture have two frames
We would like define parameters of relative motion which depend on properties of the frames by following way:
| N | Frame 1 implements IVelocity | Frame 1 implements IAngularVelocity | Frame 2 implements IVelocity | Frame 2 implements IAngularVelocity | Range velocity | Relative velocity components Vx, Vy, Vz | Relative angular velocity components |
| 1 | No | No | No | No | No | No | No |
| 2 | Yes | No | No | No | No | No | No |
| 3 | No | Yes | No | No | No | No | No |
| 4 | Yes | Yes | No | No | No | No | No |
| 5 | No | No | Yes | No | No | No | No |
| 6 | Yes | No | Yes | No | Yes | No | No |
| 7 | No | Yes | Yes | No | No | No | No |
| 8 | Yes | Yes | Yes | No | Yes | No | No |
| 9 | No | No | No | Yes | No | No | No |
| 10 | Yes | No | No | Yes | No | No | No |
| 11 | No | Yes | No | Yes | No | No | No |
| 12 | Yes | Yes | No | Yes | No | No | No |
| 13 | No | No | Yes | Yes | No | No | No |
| 14 | Yes | No | Yes | Yes | Yes | No | No |
| 15 | No | Yes | Yes | Yes | No | No | No |
| 16 | Yes | Yes | Yes | Yes | Yes | No | No |
13 Physical fields
13.1 Outlook
Standard natural science education includes following disciplines:
- Mechanics;
- Field theory;
- Other disciplines.
Now we would like study field theory. Field theory could not be separated from geometry and mechanics. Let us consider
Coulomb's law which states that the magnitude of the Electrostatics force of interaction between two point charges is directly proportional to the scalar multiplication of the magnitudes of charges and inversely proportional to the square of the distances between them.
So electrostatic field depends on geometrical position.
Basic types of physical types are presented below:
IPhysicalField - basic interface of all physical fields;IFieldConsumer - consumer of physical field;FieldLink - link between IPhysicalField and IFieldConsumer. This class is an arrow because it implements ICategoryArrow interface.
What is a field consumer? It is an object which depends of field. For example an airplane depends of radar irradiation field. Otherwise the airplane reflects irradiation. So airplane is simultaneously both IFieldConsumer and IPhysicalField. Following code represents implementation of these types:
public interface IPhysicalField
{
int SpaceDimension
{
get;
}
int Count
{
get;
}
object GetType(int n);
object GetTransformationType(int n);
object[] this[double[] position]
{
get;
}
}
public interface IFieldConsumer
{
int SpaceDimension
{
get;
}
int Count
{
get;
}
IPhysicalField this[int n]
{
get;
}
void Add(IPhysicalField field);
void Remove(IPhysicalField field);
void Consume();
}
[Serializable()]
public class FieldLink : ICategoryArrow, IRemovableObject, ISerializable, IFieldFactory
{
#region Fields
static private IFieldFactory factory = new FieldLink();
protected object obj;
private IFieldConsumer source;
private IPhysicalField target;
#endregion
#region Ctor
public FieldLink()
{
}
protected FieldLink(SerializationInfo info, StreamingContext context)
{
}
#endregion
#region ICategoryArrow Members
ICategoryObject ICategoryArrow.Source
{
get
{
return source as ICategoryObject;
}
set
{
source = value.GetSource<IFieldConsumer>();
}
}
ICategoryObject ICategoryArrow.Target
{
get
{
return target as ICategoryObject;
}
set
{
IFieldFactory f = factory;
if (f != null)
{
IPhysicalField ph = value.GetTarget<IPhysicalField>();
if (ph != null)
{
target = ph;
if (source.SpaceDimension != target.SpaceDimension)
{
throw new CategoryException("Illegal space dimension");
}
source.Add(target);
return;
}
}
CategoryException.ThrowIllegalTargetException();
}
}
bool ICategoryArrow.IsMonomorphism
{
get { throw new Exception("The method or operation is not implemented."); }
}
bool ICategoryArrow.IsEpimorphism
{
get { throw new Exception("The method or operation is not implemented."); }
}
bool ICategoryArrow.IsIsomorphism
{
get { throw new Exception("The method or operation is not implemented."); }
}
ICategoryArrow ICategoryArrow.Compose(ICategory category, ICategoryArrow next)
{
throw new Exception("The method or operation is not implemented.");
}
#endregion
#region IAssociatedObject Members
object IAssociatedObject.Object
{
get
{
return obj;
}
set
{
obj = value;
}
}
#endregion
#region IRemovableObject Members
void IRemovableObject.RemoveObject()
{
source.Remove(target);
}
#endregion
#region ISerializable Members
void ISerializable.GetObjectData(SerializationInfo info, StreamingContext context)
{
}
#endregion
#region IFieldFactory Members
IFieldConsumer IFieldFactory.GetConsumer(object obj)
{
if (obj is IAssociatedObject)
{
IAssociatedObject ao = obj as IAssociatedObject;
return ao.GetObject<IFieldConsumer>();
}
return null;
}
IPhysicalField IFieldFactory.GetField(IFieldConsumer consumer, object obj)
{
if (obj is IAssociatedObject)
{
IAssociatedObject ao = obj as IAssociatedObject;
object o = ao.GetObject<PhysicalField.Interfaces.IPhysicalField>();
}
return null;
}
#endregion
#region Specific Members
static public IFieldFactory Factory
{
get
{
return factory;
}
set
{
factory = value;
}
}
#endregion
}
13.2 Covariant Physical Fields
Vector field can be simply an
ordered set of 3 real parameters or it can be
covariant. Following picture explains meaning of the "covariant" word.
If 3D vector is not covariant then its components depend on sensor position only. Covariant vector components depend on both orientation and position. Values of components are projections of geometric vector to sensor's axes of reference. The picture above presents two orientations of sensor: blue and green. Projections of field vector A
are different for these different orientations. Besides covariant vectors Framework supports covariant tensors.
Such tensors can be used in Gravimetry.
Let us consider following task. We have a spatially fixed electrical charge which interacts with another charge. Following picture represents this phenomenon:
The Electrostatics field object represents field of fixed charge. It is linked with motionless spatial frame. The Field link is an arrow of FieldLink type, it has an icon. Source of Field is the Sensor object of PhysicalFieldMeasurements3D type. The PhysicalFieldMeasurements3D type supplies virtual measurements of field parameters. Otherwise the Sensor object is linked to Motion frame object. It means position of virtual position of Sensor coincides with position of Motion frame. Results of virtual field measurements are exported in the Motion equations object which represents
Newton's Second Law. Properties of Motion equations are presented below:
Otherwise parameters of Motion equations are exported as coordinates of the Motion frame:
This sample is a good demonstration of abstract nonsense because it includes following three domains:
- Information flow;
- 6D Motion;
- Physical fields.
14. Bridge pattern instead multiple inheritance
The Bridge Pattern decouples an abstraction from its implementation so that the two can vary independently. This decomposition provides economy in above case of physical fields. We do not need class which simultaneously implements both IPosition and IPhysicalField. Instead we have a Position class which contains a field which implements IPhysicalField interface. This situation is generalized such that object has children. Any object with children fields implements following interface:
public interface IChildrenObject
{
IAssociatedObject[] Children
{
get;
}
}
Following functions find a child such that it implements necessary interface:
public static T GetObject<T>(this IAssociatedObject obj) where T : class
{
if (obj is T)
{
return obj as T;
}
if (obj is IChildrenObject)
{
IChildrenObject co = obj as IChildrenObject;
IAssociatedObject[] ch = co.Children;
if (ch != null)
{
foreach (IAssociatedObject ob in ch)
{
T a = GetObject<T>(ob);
if (a != null)
{
return a;
}
}
}
}
return null;
}
public static T GetObject<T>(this IAssociatedObject obj, string message) where T : class
{
T a = GetObject<T>(obj);
if (a != null)
{
return a;
}
throw new Exception(message);
}
public static T GetSource<T>(this IAssociatedObject obj) where T : class
{
return GetObject<T>(obj, CategoryException.IllegalSource);
}
public static T GetTarget<T>(this IAssociatedObject obj) where T : class
{
return GetObject<T>(obj, CategoryException.IllegalTarget);
}
Application of these functions is shown below:
ICategoryObject ICategoryArrow.Source
{
get
{
return source as ICategoryObject;
}
set
{
source = value.GetSource<IFieldConsumer>();
}
}
ICategoryObject ICategoryArrow.Target
{
get
{
return target as ICategoryObject;
}
set
{
target = value.GetTarget<IPhysicalField>();
source.Add(target);
}
}
15 Statistics
The staticstics domain contains following basic objects:
- Structured selection (
IStructuredSelection intreface) - Collection of structured collections (
IStructuredSelectionCollection intreface) - Consumer of a collection of structured selections (
IStructuredSelectionConsumer intreface) - Link between consumer of selections and a collection of structured selections(
SelectionLink class which implements ICategoryArrow interface)
Source (resp. Target) of SelectionLink is an object of IStructuredSelectionConsumer (resp. IStructuredSelectionCollection) type
Following code represents these interfaces:
public interface IStructuredSelection
{
int DataDimension
{
get;
}
double? this[int n]
{
get;
}
double GetWeight(int n);
double GetApriorWeight(int n);
int GetTolerance(int n);
void SetTolerance(int n, int tolerance);
bool HasFixedAmount
{
get;
}
string Name
{
get;
}
}
public interface IStructuredSelectionCollection
{
int Count
{
get;
}
IStructuredSelection this[int i]
{
get;
}
}
public interface IStructuredSelectionConsumer
{
void Add(IStructuredSelectionCollection selection);
void Remove(IStructuredSelectionCollection selection);
}
[Serializable()]
public class SelectionLink : CategoryArrow, IRemovableObject, ISerializable
{
#region Fields
private int a = 0;
private IStructuredSelectionConsumer source;
private IStructuredSelectionCollection target;
#endregion
#region Constructors
public SelectionLink()
{
}
protected SelectionLink(SerializationInfo info, StreamingContext context)
{
info.GetValue("A", typeof(int));
}
#endregion
#region ICategoryArrow Members
public override ICategoryObject Source
{
get
{
return source as ICategoryObject;
}
set
{
source = value.GetSource<IStructuredSelectionConsumer>();
}
}
public override ICategoryObject Target
{
get
{
return target as ICategoryObject;
}
set
{
IStructuredSelectionCollection c =
value.GetTarget<IStructuredSelectionCollection>();
target = c;
source.Add(target);
}
}
#endregion
#region IRemovableObject Members
public void RemoveObject()
{
source.Remove(target);
}
#endregion
#region ISerializable Members
public void GetObjectData(SerializationInfo info, StreamingContext context)
{
info.AddValue("A", a);
}
#endregion
}
Above interfaces are very abstract. Let us consider an example of these interfaces. Suppose that we have following table.
We would like approximate this table by following equation:
Y=aX2+ bY + c;
where a, b, c are unknown parameters. Following picture contains solution of this task.
The Selection is a object of Series type which implements the IStructuredSelectionCollection interface. It contains two selections:
- X - values of above table (X - coordinates of chart)
- Y - values of above table (Y - coordinates of chart)
The GLM is an object of AliasRegression type which implements a IStructuredSelectionConsumer interface.The SL link with icon is a link of the SelectionLink type. The SL links GLM with Selection. It means that GLM statistical analysis Selection, i.e. GLM defines unknown parameters (a, b and c) by
Generalized linear model. This example is very simple. However these are very complicated samples.
This article contains a complicated sample of an
Orbit determination which contains:
Many samples are contained in
my article devoted to regression.
16 Statistics + 6D Motion. Pulse-Doppler radar application
Pulse-Doppler radars is a system capable of detecting a target's distance and its radial velocity (range-rate). Some radars systems capable of detecting
altitude and azimuth
Let us consider determination of target's motion parameters by two pulse radars.
Following picture represents this situation
The Motion parameters component defines motion parameters given by
Formula_1= at + b;
Formula_1= ct + d;
Formula_1= ft + g
where t is the time, a, b, c, d, f, d are constants which we would like to define. The Motion parameters component implies symbolic calculation of time derivation. Following table contains mapping between Motion parameters parameters and Target Frame motion parameters:
| N | Motion parameters output parameter | Target Frame motion parameter |
| 1 | Formula_1 | X- coordinate |
| 2 | Formula_2 | Y- coordinate |
| 3 | Formula_3 | Z- coordinate |
Since Motion parameters supplies symbolic calculation of derivations the Target Frame is supplied by implicit calculation of velocity. The Relative 1 (resp. Relative 2) supplies parameters of
Target Frame motion with respect to Frame 1 (resp. Frame 2). The Measurements calculates parameters supplied by radars.
Target's distance and its radial velocity are given directly from
Relative 1 and Relative 2 (both Relative 1 and Relative 2 implicitly calculate radial velocity). Altitude ? and azimuth a are given by:
Full picture of motion determination is presented below:
This picture contains following additional parameters:
- Selections target's distance, radial velocity, altitude and azimuth
- Accumulator of measurements
- Standard deviations of selections
- Selections with
unequal variances
- General linear model component
The GLM is general linear model which has following properties:
Right part contains defined parameters a, b, c, d, f, g of Motion parameters. Middle part contains calculated parameters. Right part contains selections with unequal variances.
The general linear model defines values of parameters a, b, c, d, f,
g such that square difference between values of selections and calculated values become minimal.
17 Image processing
The image processing domain contains following basic types:
- Provider of bitmap (
IBitmapProvider intreface) - Consumer of bitmap (
IBitmapConsumer intreface) - Link between a consumer of bitmap and a provider of bitmap(
BitmapConsumerLink class which implements ICategoryArrow interface)
An icon corresponds to the BitmapConsumerLink arrow. Following code represents these interfaces:
public interface IBitmapProvider
{
Bitmap Bitmap
{
get;
}
}
public interface IBitmapConsumer
{
void Process();
IEnumerable<IBitmapProvider> Providers
{
get;
}
void Add(IBitmapProvider provider);
void Remove(IBitmapProvider provider);
event Action<IBitmapProvider, bool> AddRemove;
}
[Serializable()]
public class BitmapConsumerLink : CategoryArrow, IRemovableObject, ISerializable
{
#region Fields
static public readonly string ProviderExists = "Bitmap provider already exists";
public static readonly string SetProviderBefore =
"You should create bitmap provider before consumer";
private int a = 0;
private IBitmapConsumer source;
private IBitmapProvider target;
#endregion
#region Constructors
public BitmapConsumerLink()
{
}
protected BitmapConsumerLink(SerializationInfo info, StreamingContext context)
{
info.GetValue("A", typeof(int));
}
#endregion
#region ICategoryArrow Members
public override ICategoryObject Source
{
get
{
return source as ICategoryObject;
}
set
{
source = value.GetSource<IBitmapConsumer>();
}
}
public override ICategoryObject Target
{
get
{
return target as ICategoryObject;
}
set
{
target = value.GetTarget<IBitmapProvider>();
source.Add(target);
}
}
#endregion
#region IRemovableObject Members
public void RemoveObject()
{
if (source != null & target != null)
{
source.Remove(target);
}
}
#endregion
#region ISerializable Members
public void GetObjectData(SerializationInfo info, StreamingContext context)
{
info.AddValue("A", a);
}
#endregion
#region Specific Members
public static void Update(IBitmapConsumer consumer)
{
IEnumerable<IBitmapProvider> providers = consumer.Providers;
foreach (IBitmapProvider provider in providers)
{
if (provider is IBitmapConsumer)
{
IBitmapConsumer c = provider as IBitmapConsumer;
Update(c);
}
}
consumer.Process();
}
#endregion
#region Private
IBitmapConsumer AssociatedSource
{
get
{
if (source == null)
{
return null;
}
if (source is IAssociatedObject)
{
IAssociatedObject ao = source as IAssociatedObject;
object o = ao.Object;
if (o is IBitmapConsumer)
{
return o as IBitmapConsumer;
}
}
return null;
}
}
#endregion
}
Following picture represents an example of image processing:
A Lady Rose is an object of SourceBitmap type which implements the IBitmapProvider inteface. Object of this type serializes an image bitmap. A Lady Blue is an object of the BitmapTransformer type, which implements the IBitmapConsumer interface. Objects of this type supply image transformation. The BitmapTransformer type also implements the IBitmapProvider interface because it provides transformed image. This feature is used for cascade image transformation. Example of cascade image transformation is presented below:
The Initial image is transformed to the Grayscale image. Then the Grayscale image is transformed to the Gradient image by
non local image processing.
18 Image processing + information flow
18.1 Processing of one bitmap
Digital image processing has classes which implement
IDataConsumer and/or IMeasurements interfaces. Let us
consider local digital filtration sample.
The above picture contains the following objects:
| N | Object name | Type | Implemented interfaces |
| 1 | Earth | SourceBitmap | IBitmapProvider |
| 2 | Result of processing | BitmapTransformer | IBitmapProvider, IBitmapConsumer,
IDataConsumer |
| 3 | Formulae | VectorFormulaConsumer | IMeasurements, IAlias |
The Result of processing object as
IBitmapConsumer is connected to Earth as
IBitmapProvider. A connection arrow is an object of BitmapConsumerLink type. The
Result of processing object as IDataConsumer is
connected to Formulae as IMeasurements. A connection arrow is an object of
DataLink type. Any object of
SourceBitmap class stores just stores image in memory. Main
members of this class are presented below.
#region Fields
protected Bitmap bitmap;
#endregion
#region Ctor
public SourceBitmap()
{
}
public SourceBitmap(SerializationInfo info, StreamingContext context)
{
try
{
bitmap = (Bitmap)info.GetValue("Bitmap", typeof(Bitmap));
}
catch (Exception ex)
{
ex.ShowError(100);
}
}
#endregion
#region ISerializable Members
public override void GetObjectData(SerializationInfo info, StreamingContext context)
{
info.AddValue("Bitmap", bitmap);
}
#region IBitmapProvider Members
Bitmap IBitmapProvider.Bitmap
{
get
{
return bitmap;
}
}
#endregion
public void SetBitmap(Bitmap bitmap)
{
this.bitmap = bitmap;
}
Business logic of SourceBitmap is very clear. This class has a
field of Bitmap type. User can set value of this field? This field
is serialized and is also used as Bitmap of
IBitmapProvider interface. The Formulae object has
following properties.
This formula calculates color from color of source bitmap. Parameters
r, g and b correspond to red, green and blue color of
source bitmap. If values of all colors exceed threshold value (a then
formula returns x. Otherwise it returns y. Object
Result of processing following properties.
These properties have following meaning. Object scans bitmap of provider
object (Earth) and detects colors of pixels. It sets these
objects as aliases of Formulae. Then it calculates
Formulae and sets Formula_1 as red, green and
blue color of result bitmap. Source bitmap and transformation result are
presented below.
This algorithm is simplest rough algorithm of detection of snow mantle. C#
explanation of this algorithm is presented below.
VectorFormulaConsumer formulae = ...;
IMeasurements measurements = formulae;
IMeasure m = measurements[0];
IAlias alias = formulae;
SourceBitmap sb = ...;
IBitmapProvider provider = sb;
Bitmap source = provider.Bitmap;
Bitmap target =
new Bitmap(source.Width, source.Height);
for (int x = 0; x < source.Width; x++)
{
for (int y = 0; y < source.Height; y++)
{
Color colorSource = source.GetPixel(x, y);
double r = (double)colorSource.R / 256;
double g = (double)colorSource.G / 256;
double b = (double)colorSource.B / 256;
alias["r"] = r;
alias["g"] = g;
alias["b"] = b;
measurements.UpdateMeasurements();
double cd = (double)m.Parameter();
int cdi = (int)(cd * 256);
Color colorTarget =
Color.FromArgb(cdi, cdi, cdi);
target.SetPixel(x, y, colorTarget);
}
}
Note that colors of target can be different as it is shown in "Lady Blue"
sample. Above code snippet does not present in program code, it is just clarify
explanation of an algorithm. More information about this subject you can find in my
article "Digital Image Processing".
18.2 Processing of two bitmaps
Several tasks imply simultaneous processing of several images. For example
a clouds' motion indication requires comparison of two or more images.
Following picture represents comparison of two images
This picture has following objects
| N | Object name | Type | Implemented interfaces | Comment |
| 1 | Picture 1 | SourceBitmap | IBitmapProvider | First source image |
| 2 | Picture 2 | SourceBitmap | IBitmapProvider | Second source image |
| 3 | P 1 | BitmapColorTable | IBitmapConsumer, IDataConsumer,
IMeasurements | Adapter object |
| 4 | P 2 | BitmapColorTable | IBitmapConsumer, IDataConsumer,
IMeasurements | Adapter object |
| 5 | Input | VectorFormulaConsumer | IMeasurements, IAlias | Digital image processing calculator |
| 6 | Result | VectorFormulaConsumer | IMeasurements, IAlias | Digital image processing calculator |
| 7 | Compare | BitmapTransformer | IBitmapProvider, IBitmapConsumer,
IDataConsumer | Digital image processing result |
The Compare object as IBitmapConsumer is
connected to Picture 2 as IBitmapProvider. A connection arrow is object of the
BitmapConsumerLink type. It means that
P 2 provides bitmap for Compare. According to
BitmapTransformer implementation it means that size of
Compare bitmap is the same as Picture 2 one.
The Compare has following properties:
These properties have following meaning. The Compare object
scans own bitmap and sets alias parameters as values of pixel coordinates. Then
it sets Formula_1 value as red, green and blue color of image.
Following code clarifies this algorithm.
VectorFormulaConsumer Input = ...;
VectorFormulaConsumer Result = ...;
IAlias alias = Input;
IMeasurements measurements =
Result;
IMeasure Formula_1 = measurements[0];
Bitmap Compare = ...;
for (int x = 0; x < Compare.Width; x++)
{
for (int y = 0; y < Compare.Height; y++)
{
alias["x"] = (double)x;
alias["y"] = (double)y;
measurements.UpdateMeasurements();
int color =
(int)((double)Formula_1.Parameter() * 256);
Color c = Color.FromArgb(color, color, color);
Compare.SetPixel(x, y, c);
}
}
Both P 1 and P 2 are objects of
BitmapColorTable type. This type as IDataConsumer
consumes coordinates of a pixel, and as IMeasurements provides RGB color
parameters of the pixel. Following picture
means that P 1 returns RGB parameters of Picture
1 bitmap pixel. Coordinate x (resp. y) of pixel
equals to Formula_1, (resp. Formula_2) of
Input. Properties of Input are
presented below.
So parameter x (resp. y) of Input as
IAlias equals to Formula_1 (resp. Formula_2) of
the same object as IMeasurements. Thus input parameters of both
P 1, P 2 are pixel coordinates of
Compare bitmap. Properties of Result are
presented below.
Parameter x (resp. y) of this object is Red
parameter of P 1 (resp. P 2), i.e. red
component of pixel of Picture 1 (resp. Picture
2). Formula_1 of Result is proportional to
difference between red components of Picture 1 and
Picture 2.
19. Image processing + information flow + statistics
Any image contains a digital information. So images can be regarded as statistical objects. Following picture contains a dirty chart:
This chart contains a graphic representation of a math dependency. We would like to find the dependency. Digital image processing provides removing of noise. In result we have following image:
Then this picture is transformed to selections of coordinates of black pi?els:
.
And at last we find math dependency:
Let us explain this task in details. All elements of this task are represented in the following picture:
Properties of the Boolean object are presented below:
where r, g, b are values of red, blue and green color respectively. The i, j, k, l, m, n are constants which define intervals of color values. Above formula returns true these intervals simultaneously contain values of red, green, and blue colors. Following picture presents properties of Function object:
.
If above intervals contain red, green, and blue colors then above formula returns 0, otherwise it returns 1. Properties of Transform object are presented below:
.
These properties mean following:
- Values of r, g, b of the Boolean object are respectively assigned to values of red, green, and blue color of the Source image
- Values of red, green, and blue color of the Transform image are assigned to Formula_1 value of the Function object.
In result we nave following picture:
This picture can be regarded as two selections:
- X - coordinates of black pixels
- Y - coordinates of black pixels
The BitmapGraphSelection type is intended for transformation of images to selections. This type implements both IBitmapConsumer and IStructuredSelectionCollection. Following picture explains this circumstance:
The Transform object implements the IBitmapProvider interface. It provides a bitmap with black pixels. A Selection is an object of BitmapGraphSelection type which implements the IBitmapConsumer interface. The Selection as IBitmapConsumer is connected to Transform, and a connection arrow is object of BitmapConsumerLink type. The Selection object transforms sets of black pixels into two selections of their coordinates. Red crosses of Selection correspond to coordinates of selection values. The Regression component contains following formula:
The formula represents a polynomial of degree 3. The x parameter of the formula is array of X - coordinates of Selection. The a, b, c, d, f, g are real constants. Following left (resp. right) picture contains values of these constants before (resp. after) regression operation. Above formula supplies pointwise calculation of polynomial. Calculation result is array of polynomial values which correspond to X - coordinates of the Selection object.
The Processor object supplies a regression. Its properties are presented below:
Left part of above form means that parameters a, b, c, d, f, g of the Regression object should be defined. The "-1" in the center and right mean that Formula_2 of Regression and X of Selection are not taken to account. The "0" means that X - coordinates of Selection should be approximated by values of Formula_1 of the Regreesion object. Following picture shows a regression result:
A blue curve represents the approximation polynomial and little red crosses represent approximated points.
20 Image processing + Internet
Appllication of Internet images essentially enriches scientific software. For example pictures from
NASA Earth Observations are very useful for geoscience research.
Following component contains Internet image:
Top text editor of above represents image url
http://neo.sci.gsfc.nasa.gov/servlet/RenderData?si=1221909&cs=rgb&format=JPEG&width=720&height=360. The NASA Image is an object of following type:
[Serializable()]
public class ExternalImage : SourceImage, IUrlConsumer, IUrlProvider
This type is subtype of SourceImage therefore it implements the IBitmapProvider interface. It also implements following interfaces:
public interface IUrlProvider
{
string Url
{
get;
}
}
public interface IUrlConsumer
{
string Url
{
set;
}
}
Both these interfaces are intended for interpretability with Internet.
20 Image processing + Information flow + Internet + Statistics.
Let us consider an Internet analogue of considered in section 20 task. We would like to find
Space weather indices from Internet charts. This task is rather artificial since Internet contains numerical values of Space weather indices. The
Geomagnetic Disturbance Index Web page contains an image which looks like following:
However this image is daily updated. Its URL is also updated and it can be
http://www.nwra.com/spawx/f10_095524.gif or http://www.nwra.com/spawx/f10_279924.gif etc. And any former image become unavailable next day. Following class is specialized for such images:
[Serializable()]
public class ExternalContextImage : ExternalImage
{
#region Fields
string contextURL;
string context;
#endregion
Following picture contains example of the ExternalContextImage application.
The contextURL (resp. context) fields is equal to
http://www.nwra.com/spawx/f10.html (resp. "<IMG SRC="f10") and responsible for a html page
URL (resp. an image context). The http://www.nwra.com/spawx/f10.html had the following code:
<H2>10.7cm Solar Radio Flux<BR>
<I>(Observed and Derived from GPS IONO Model)</I></H2>
<P>
<IMG SRC="f10_279924.gif" ALT="Picture" ALIGN = MIDDLE>
</P>
Above code contains "<IMG SRC="f10" context near necessary image URL. Following code contains a detection algorithm of image URL.
private string GetUrl()
{
try
{
if (context.IsEmpty() | contextURL.IsEmpty())
{
return null;
}
string ctx = context.ToLower();
WebRequest req = WebRequest.Create(contextURL);
req.Timeout = 10000;
WebResponse rs = req.GetResponse();
System.IO.TextReader reader = new System.IO.StreamReader(rs.GetResponseStream());
IEnumerable<string> en = reader.ToEnumerable();
foreach (string str in en)
{
string ss = str.ToLower();
string url = str + "";
if (str.ToLower().Contains(ctx))
{
int n = ss.IndexOf(ctx);
url = url.Substring(n);
ss = ss.Substring(n);
n = ss.IndexOf("src");
url = url.Substring(n);
ss = ss.Substring(n);
n = ss.IndexOf("\"") + 1;
url = url.Substring(n);
ss = ss.Substring(n);
n = ss.IndexOf("\"");
url = url.Substring(0, n);
ss = ss.Substring(0, n);
if (!ss.Contains("http:"))
{
string bb = contextURL.Substring(0, contextURL.LastIndexOf("/") + 1);
url = bb + url;
}
return url;
}
}
return null;
}
catch (Exception ex)
{
ex.ShowError();
}
return null;
}
The F 10 is an object of ExternalContextImage type and it supplies following image
This image is converted to following image:
And then this image is converted to following selection:
Let us represent the above selection as continous curve:
It is clear that this selection contains
outliers. In statistics, an outlier is an observation that is numerically distant from the rest of the data. So Robust statistics is required. Robust statistics requires an essential increase of a calculations. But it is not critical for a lot of tasks. However there are very complicated tasks (example of complicated task) such that calculation volume is critical. Long time ago I had developed very simple robust method which is easy explained. Suppose that it is a corkscrew road (red curve) and a car:
Since maneuverability of the car is limited it runs along blue trajectory which does not have huge outliers. This smoothed curve can be easily calculated because a volume of calculation linearly depends on a volume of
selection. Usually robust methods have more rapid growth of calculation
resources. The smoothed function is used for calculation of
statistical weight function. Weight of a statistical point is a
monotonically decreasing function which depends on distance between the point and smoothed curve, i. e. far from smoothed curve points have low weights. Full picture of algorithm is presented below:
.
Components Points filter, Red, Green, Blue, Tresh are intended for image filtering. In result we have a F10 filtered image. This image is transformed to the F 10 selection selection and F 10 selection is transformed to the Chart chart. The Chart is used in ordinary differential equation
which imitate a motion of a low maneverability car:
where k and c are constants f(t) is a function which is provided by the Chart component (the corkscrew road). The exponential factor is intended for reducing an influence of outliers. The solution of this equation is smoothed (blue) curve. The Diff component performs solution of above differential equation. Properties of Diff are presented below:
where a is function provided from Chart, k, c and b are constant. The b is a constant that takes into account initial conditions summand. Let us explain previous statement. It is known that any solution of an ordinary differential equation depends on its initial condition. Roughly speaking trajectory of car depends on its initial position. So wee need know initial position of the car. This task is not trivial because selection has outliers. The
segmented linear regression is used for filtering of outliers. Following picture represents a segmented regression result:
So we have an approximation a red line by a piecewise linear function (blue curve). The blue curve does not contain huge outliers and it is used for definition of initial condition. Following picture presents segmented linear regression:
The F 10 Selection object is a selection which we would like approximate by F 10 Linear function. Properties of Regression 1 are presented below:
The f is exported from F10 Linear function. Argument of f is array of X - coordinates of F 10 Selection. Properties of GLM 1 are presented below:
Approximation result is used as initial conditions for the smoothed curve. The Init object has following properties:
where f (resp. g is exported from Chart (resp. F10 Linear. Both these functions are exported to Diff which solves following ordinary differential equation.
.
The Weight object is intended for calculation of
regression weights:
If a point is far from solution of differential equation (smooth curve) then it have low weight, i.e. it is regarded as outlier. The Accumulator object transforms potential function of weights to actual one. Difference between potential function and actual one is explained
here. Properties of the Accumulator object are presented below:
i. e. Accumulator makes actual functions which are defined on the [50, 50 + 1 * 280] interval. The Coeff object contains coefficients of regression polynomial:
.
Values of Y - components are just polynomial coefficients. First (resp. second) above image contains values of coefficients before (resp. after) regression process. The Poly object calculates polynomial by following given by:
where x (resp. y) is array of X - coordinates (resp. Y coordinates) of Coeff. Since X - coordinates of Coeff are equal to 0, 1, 2, 3, 4, 5 above formula gives following expression:
Formula_1= y[0] + y[1]t + y[2]t2 + y[3]t3 + y[4]t4 + y[5]t5;
The Accumulator transforms this polynomial to actual function. The Weight formula object has following properties:
where f (resp. g) is actual function of Weight (resp. Poly object), f calculates weights of regression, g calculates values of regression polynomial. The x argument of both functions is array of X - coordinates of F 10 Selection object. Properties of Weight selection object are presented below:
X (resp. Y) - coordinates of Weight selection are X coordinates of F 10 Selection (resp. output array of Formula_1 of Weight formula object, i.e. selection of weights. The Sigma is an object of following type:
[Serializable()]
public class CombinedSelection : CategoryObject, ISerializable, IStructuredSelection,
IStructuredSelectionConsumer, IPostSetArrow, IStructuredSelectionCollection
This object contains both selection of data and selection of weights. These selections are used in
Weighted Least Squares Regression. Properties of Sigma are presented below:
Above picture means that data selection (resp. selection of weights) is Y - selection of F 10 Selection object (resp.Y - selection of Weight Selection object). Properties of Regression 2 object are presented below:
where function f is regression polynomial as actual function, x is array of X - coordinates of F 10 Selection object. Properties of GLM 2 are presented below:
Left part of above picture means that we would like define ordinates (i. e. Y - components of the Chart object. This ordinates are coefficients of approximation polynomial. Middle part means that we would like approximate a selection by a Formula_1 of Regression 2. The Formula_1 is a result of componentwise calculation of polynomial. Right part of above picture means that we would like approximate the Y_Y selection of the Sigma object. Following picture shows approximation result:
Red crosses are points of the selection, a blue curve represents an approximation polynomial.
21 3D Graphics
At 2002 I was engaged by
3D graphics. I had need for multiwindow mode. De facto
DirectX did not support multiwindow mode. So I should use
OpenGL. I found that
high coupling to OpenGL is not good idea. Later I found that
Autodesk 3ds Max can use both OpenGL and DirectX. I developed abstract layer for 3D Graphics for future. A lot of years I was not engaged by 3D Graphics. At 2010 I had resumed 3D Graphics development, and implemented
WPF implementation of abstract 3D Graphics level. I found that
high coupled to OpenGL software could not be adopted to other 3D Graphics technologies. I had no need abstract layer in present,
however I need it in future. I wrote The time machine article about it. Now my soft supports both OpenGL and WPF.
21.1 Abstraction layer
Abstraction layer of 3D Graphics does not depend on implemetation. It following basic types:
- 3D visible object (
IVisible intreface) - Consumer of 3D visible object (
IVisibleConsumer intreface) - Link between 3D visible object and consumer of 3D visible object (
VisibleConsumerLink class which implements ICategoryArrow interface) The icon corresponds to VisibleConsumerLink.
Following code represents these types:
public interface IVisible : IPositionObject
{
}
public interface IPositionObject
{
IPosition Position
{
get;
set;
}
}
public interface IVisibleConsumer
{
void Add(IVisible visible);
void Remove(IVisible visible);
void Post(IVisible visible);
event Action<IVisible> OnAdd;
event Action<IVisible> OnRemove;
event Action<IVisible> OnPost;
}
[Serializable()]
public class VisibleConsumerLink : ICategoryArrow, ISerializable, IRemovableObject, IPostSerialize
{
#region Fields
protected object obj;
protected IVisibleConsumer source;
protected IVisible target;
#endregion
#region Ctor
public VisibleConsumerLink()
{
}
protected VisibleConsumerLink(SerializationInfo info, StreamingContext context)
{
}
#endregion
#region ICategoryArrow Members
ICategoryObject ICategoryArrow.Source
{
get
{
return source as ICategoryObject;
}
set
{
if (!(value is IPosition))
{
CategoryException.ThrowIllegalSourceException();
}
IPosition p = value as IPosition;
if (value is IVisibleConsumer)
{
source = value as IVisibleConsumer;
return;
}
if (p.Parameters == null)
{
CategoryException.ThrowIllegalSourceException();
}
object o = p.Parameters;
if (!(o is IVisibleConsumer))
{
CategoryException.ThrowIllegalSourceException();
}
source = o as IVisibleConsumer;
}
}
ICategoryObject ICategoryArrow.Target
{
get
{
return target as ICategoryObject;
}
set
{
if (value is IPosition)
{
IPosition p = value as IPosition;
if (p.Parameters == null)
{
CategoryException.ThrowIllegalSourceException();
}
object o = p.Parameters;
if (o is IVisible)
{
target = o as IVisible;
source.Add(target);
}
}
else
{
CategoryException.ThrowIllegalTargetException();
}
}
}
bool ICategoryArrow.IsMonomorphism
{
get { throw new Exception("The method or operation is not implemented."); }
}
bool ICategoryArrow.IsEpimorphism
{
get { throw new Exception("The method or operation is not implemented."); }
}
bool ICategoryArrow.IsIsomorphism
{
get { throw new Exception("The method or operation is not implemented."); }
}
ICategoryArrow ICategoryArrow.Compose(ICategory category, ICategoryArrow next)
{
throw new Exception("The method or operation is not implemented.");
}
#endregion
#region IAssociatedObject Members
object IAssociatedObject.Object
{
get
{
return obj;
}
set
{
obj = value;
}
}
#endregion
#region ISerializable Members
void ISerializable.GetObjectData(SerializationInfo info, StreamingContext context)
{
}
#endregion
#region IRemovableObject Members
void IRemovableObject.RemoveObject()
{
source.Remove(target);
}
#endregion
#region IPostSerialize Members
void IPostSerialize.PostSerialize()
{
source.Post(target);
}
#endregion
}
The IVisible is a subtype of IPositionObject, i.e. any visible 3D object is associated with 3D position because 3D object is senseless without 3D position. Following picture represents an example ot these types
Following table represents types of above objects:
| N | Object | Type | Interfaces |
| 1 | Plane | WpfShape | IVisible, ICategoryObject |
| 2 | Link | VisibleConsumerLink | ICategoryArrow |
| 1 | Camera | WpfCamera | IVisibleConsumer, ICategoryObject |
Above link (Link ) means that a consumer of visible object (Camera) consumes a visible object (Plane). The "consumes" means shows, any another context can have another meaning. Indeed situation is more complicated as it is shown below
A 6D position of Plane (resp. Camera) is defined by Plane Frame, (Camera Plane). There is many to many relation between visible objects and their consumers. Following picture represents one visible object and two consumers.
Above picture contains two virtual cameras which have different 6D positions. Position of Camera 1 (resp. Camera 2) is defined by Camera 1 Frame (resp. Camera 2 Frame).
21.2 Different implemetations of the abstract layer
At 2002 I was engaged by 3D graphics. I had need for multiwindow mode. De facto DirectX did not support multiwindow mode. So I should use OpenGL. I found that high coupling to OpenGL is not good idea. Later I found that Autodesk 3ds Max can use both OpenGL and DirectX. I developed abstract layer for 3D Graphics for future. A lot of years I was not engaged by 3D Graphics. At 2010 I had resumed 3D Graphics development, and implemented WPF implementation of abstract 3D Graphics level. I found that high coupled to OpenGL software could not be adopted to other 3D Graphics technologies. I had no need abstract layer in present, however I need it in future. Now both WPF and OpenGL versions are implemented. Both versions implement interfaces from 21.1. I wrote an article about it.
21.3 Animation (3D Graphics + 6D Kimematics)
Every vitrual 3D object (or virtual camera) can be installed on a moving reference frame. So we have interoperability between 3D graphics and animation. Following picture contains a sample of such inte
The Plane object is installed on the Plane Frame. The Plane Frame implements both IDataConsumer and IReferenceFrame. This object consumes data from the Motion Parameters object. Properties of the Motion Parameters are presented below:
Above formulae are formulae of
uniform linear motion. Following table contains a mapping between motion parameters of Motion Parameters and parameters of Plane Frame
| N | Parameter of the Motion Parameters object | Parameter of the Plane Frame object |
| 1 | Formula_1 | X - coordinate of the frame |
| 2 | Formula_2 | Y - coordinate of the frame |
| 3 | Formula_3 | Z - coordinate of the frame |
| 4 | Formula_4 | Q0 - component of the orientation quaternion |
| 5 | Formula_5 | Q1 - component of the orientation quaternion |
| 6 | Formula_5 | Q2 - component of the orientation quaternion |
| 7 | Formula_5 | Q3 - component of the orientation quaternion |
21.4 Aggregates of 3D objects
Let us consider animation of helicopter motion. Motion model is already described in 11.2. Helicopter motion model
.
is aggregated, and aggregation result is presented below:
We install 3D visible objects (fuselage, tail rotor, 5 blades) on corresponding reference frames:
Then we inslall virtual cameras as it is shown below:
Above picture contains 5 virtual cameras, 7 3D objects and 5 × 7 = 35 VisibleConsumerLink () arrows. Howevere number of arrows can substantionally reduced by application of a 3D collection object as it is shown below:
The Full helicopter 3D is object of the WpfVisibleCollection type. This type implements following interfaces:
IVisible It is 3D visible object.IVisibleConsumer This object can be linked to IVisible objects by VisibleConsumerLink () arrows.IVisibleCollection It is in fact collection of 3D object.
So collection of 3D visible objects is both, a 3D visible object, and consumer of 3D objects. The "consumer" word means that this object uses 3D objects as building blocks. In case of virtual camera this word has another meaning. Now we can link this collection of these 3D objects to five cameras is it is shown below:
The Full helicopter 3D is connected to Fuselage, Tail rotor, L 1, ..., L 5 by 7 VisibleConsumerLink arrows. Otherwise five virtual cameras are linked to Full helicopter 3D by 5 arrows. It result we have 7 + 5 = 12 arrows instead 5 × 7 = 35 ones.
21.4 Deformation of 3D Shapes (Interoperability with Information Flow)
Physical 3D objects can be deformed by physical forces. For example any airplane is deformed by
aerodynamic forces. The information flow can be used for deformation of 3D shapes. Following picture represents example of deformation:
Meaning of above objects is explained below:
| N | Name | Meaning |
| 1 | Plane | Source 3D shape (without deformation) |
| 2 | Deformed Plane | Deformed 3D shape |
| 3 | Shape | Object wich contains deformation low |
| 4 | Camera | A virtual camera which shows the Plane |
| 5 | Camera Deformed | A virtual camera which shows the Deformed Plane |
Properties of the Deformed plane object are presented below:
It means that coordinates X, X, X of Plane surface correspond to parameters Shape.x, Shape.y, Shape.z respectively. Otherwise coordinates X, X, X of Deformed Plane surface correspond to Shape.Formula_1, Shape.Formula_2, Shape.Formula_3 respectively. Properties of the Shape object are presented below:
.
These properties mean that the surface of Plane is deformed according following math law:
Xdeformed = X;
Ydeformed = Y + aZ2;
Zdeformed = Z
where X, Y, Z (resp. Xdeformed, Ydeformed, Zdeformed) are coordinates of a Plane (resp. Deformed Plane) surface, a is a real constant.
The Deformed Plane is an object of DeformedWpfShape class. The DeformedWpfShape imlplements following interfaces:
IVisible It is 3D visible object.IVisibleConsumer This object can be linked to IVisible object by VisibleConsumerLink () arrow. For example the Deformed Plane is linked to the Plane IDataConsumer It cosumes transformation law. For example the Deformed Plane is linked to the Shape which contains transformation law/
Following two pictures represent transformation of square to torus and cone:
.
Transformation laws are presented below:
22 3D Graphics + Kinematics + Digital Image Processing
Given by didital image prosessing images can be used as textures of 3D visualisation. In 18.2 a processing of two Earth's photo is considered. Processing result can be used as textuire of 3D shape. Following picture represents interaction of 3D graphics, kinematics and digital image processing:
This picture contains following ingredients:
23 Web images as textures
24 3D Graphics + Physical Fields
Let us consider task of
Lightning effects simulated with efield:
Similar picture is presented below:
However my sofware is more universal since it supports
radar absorbent material. Once my colleague asked me "What kinds of radar absorbent material are supported by your software?" I asked: "Any type". FORTRAN oriented colleague was not familiar with notion of an abstract object. The C#, or Java Object type is really any object. Surface of 3D body is divided to little triangles and any triangle corresponds to its own object. Mathematically speaking object of absorbing layer can contain any number of parameters. Parameters can be real, integer, boolean. Software supports multidimensional parameters. The IFacet is a common interface of all 3D Shapes divided (facets) and every triangle has a set of values of properties.
public interface IFacet
{
int Count
{
get;
}
int ParametersCount
{
get;
}
object GetType(int n);
object this[int facet, int parameter]
{
get;
}
double[] this[int n]
{
get;
}
void SetColor(int n, double alpha, double red, double green, double blue);
string Id
{
get;
set;
}
double GetArea(int n);
double[] GetNormal(int n);
bool IsColored
{
get;
set;
}
}
This software supports any type of physical fields. For example it can be a comination of electromagnetic, heat, acoustic, and
gravity field. Moreover the software supports any type of interactions between fields and 3D objects. An example of such interaction is presented below.
The Field object is a physical field which have following properties
So coordinates X, Y, Z of 3D point correspond to parameters x, y, z of the Coord object. The field corresponds to Formula_1 parameter of the Field Formula object. This parameter is a 3D vector. The "covariant" checkbox is checked. So we have a covariant vector field. Properties of Coord object are presented below.
Formula_1, Formula_3 and Formula_3 are 3D coordinates which are used by the Coord Vector, Formula_4 is an inverse distance. Properties of the Coord Vector are presented below.
These properties mean that Formula_1, Formula_3 and Formula_3 are components of a vector which is the output of the Coord Vector object. This vector is used by the Field Formula object which has following properties.
.
The d parameter is 3D vector, Formula_1 is a math model of
dipole field
where × means a cross product.
The Surface object is an object of Shape3DField type. This type does not implement the IFieldConsumer interface. However this type implicitly implements this interface by the "bridge instead multiple inheritance" pattern. Following code snippet explains this fact
[Serializable()]
public class Shape3DField : ShapeGL, ISerializable, IFacet, IPositionObject, IChildrenObject
{
#region Fields
private FieldConsumer3D consumer = null;
IAssociatedObject[] children = new IAssociatedObject[1];
/...
#endregion
#region Ctor
internal Shape3DField()
{
consumer = new FieldConsumer3D(this);
children[0] = consumer;
}
#endregion
#region IChildrenObject Members
IAssociatedObject[] IChildrenObject.Children
{
get { return children; }
}
#endregion
So the Shape3DField contains child object of the FieldConsumer3D. Otherwise the FieldConsumer3D type implements the IFieldConsumer interface. So Shape3DField has implicit implementation of the IFieldConsumer interface. According to the
low coupling principle the FieldConsumer3D does not know about Shape3DField. Instead FieldConsumer3D knows about the IFacet interface implemened by Shape3DField. The FieldConsumer3D class implements following interfaces.
| N | Interface | Meaning | Purpose |
| 1 | IFieldConsumer | Cosumer of field | Interoperability between field and surface |
| 2 | IDataConsumer | Cosumer of data | Math description of the interoperability |
| 3 | IPositionObject | Object associated to object which have a position | Refrerence to the 3D position of 3D object |
These properties mean that f (resp. n) parameter of Interaction corresponds to first parameter of the field (resp. first parameter of surface). Both parameters are covariant 3D vectors, f is amplitude of magnetic field of dipole radiator, n is
normal to the surface. Properties of the Interaction object are presented below.
The Formula_4 is math model of the
surface current density. The Formula_1 of Current Module is a module of the current density. The rainbow scale means that violet color corresponds to mimimal value of parameter and red color corresponds to maximal one. Above situation is simplests because it does not contain properties of absorbing material. Following picture conains a sphere with three absorbing materials.
Irradiation properties of sphere parts are different.
25 Videonavigation
3D graphics can be used for videonavigation. Main idea is a comparison of video and 3D models. Following movie shows the idea.
3D model is moved such that 3D model contours approximate conours obtained by video. Following move shows approximation of one contour.
Points of Interest
One year ago I find a book about a translation of math text to English. Then I wrote
a math article. In result I improved my English.
Prospects
It is first article devoted the abstract nonsense in software development. The theme shall be continued in the following articles.

