Introduction
CarNet is a project which involves creation of an mesh network between vehicles moving in vicinity of each other. We provide a module for each vehicle which behave like nodes in the network. Various services can be provided to the users through this product. This entire network is monitored using Windows Azure cloud platform. Data from the modules is communicated between vehicles (V2V communication), vehicle and roadside hotspots, and periodically transmitted to the Azure. Some of this data will be made available to users on their smartphones or on web interface.
Services Provided
1) V2V Communication
- Navigational route optimization:
Vehicles communicate with other vehicles (V2V comm.) and ask them for information about the route to the destination. If anything unfavorable is detected, the module alerts the driver and the driver can possibly look for an alternate route.
The navigational route can also be set based on user’s requirements. For example, the user may wish to fill up his fuel tank and the module would find a route to nearest less crowded fuel station.
- Vehicle detection:
This module would help the drivers detect nearby vehicles. Even in case of poor visibility, CarNet helps to detect nearby vehicles which enables the driver to be cautious and aware.
- Enhanced vehicle tracking:
Since there is always a network formed between a fleet of vehicles in vicinity, even if a vehicle gets stolen, it can be tracked by the information provided by other vehicles which were a part of the network of the stolen vehicle.
- Distress signal:
In case of an emergency on the road, for example an ambulance, fire truck or police may have to pass through, they can send out a distress message which would alert all the drivers to give way.
2) V2I COMMUNICATION
This module can also be used to communicate with the roadside infrastructures. There are many advantages and applications of this feature. Few of the applications are:
- Detecting parking availability
- Communicating of other relevant information
- Advertising
Project Scope
This project will perform the following functions:
- Establish ad-hoc network between vehicles in the vicinity
- Communicate with other vehicles
- Communicate with roadside hotspots
- Communicate with the cloud
High-Level Requirements
The new system must include the following:
- Ability to allow users to use the module with existing vehicles
- Ability to provide real time accurate performance
- Ability to maintain user’s privacy
Software Requirements
The development of this system requires the following software:
- Visual Studios 2014/Ecclipse
- Windows 8.1
- Windows Azure
- Other IDEs of choice
Hardware Requirements
The development of this system requires the following software:
- Beaglebone Black -microprocessor
- Xbee series 2 -RF modules for transmitting/receiving of data.
- GPS module
- Bluetooth Dongle - for communication between board and user phone.
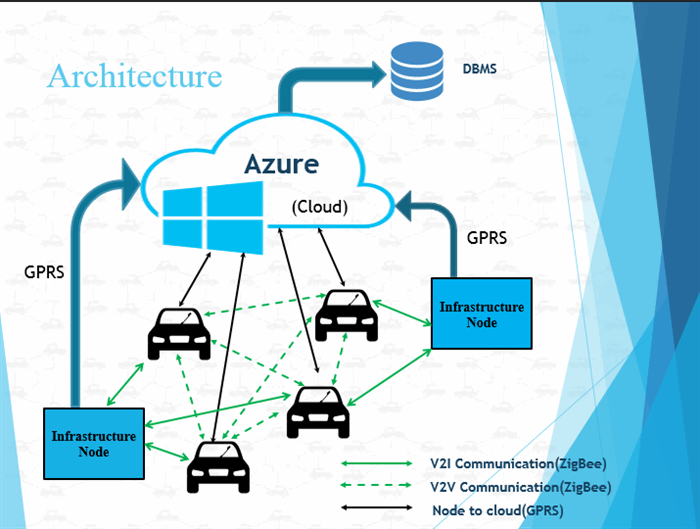
Architecture
The image below shows the basic architecture of the project.Detailed architecture will be posted soon.
Implementation
The project is under progress and prototype is being built to demo the functionalities of the above intended ideas.

